
|
| |
 |
Главная » Мануалы 1 2 3 4 5 6 7 ... 48 ивы и Рис.;2.6. Электрические схемы измерительных депей параметрических датчиков содержащейся в нем [76]. 0.. Условие оптимального согласования где г„ - сопротивление нагрузки, г,- - внутреннее сопротивление измерительной цепи, Сопт - оптимальная степень согласования. Однако при построении реальных измерительных цепей в подавляющем большинстве случаев приходится сталкиваться с тем обстоятельством, что дополнительные погрешности, вызываемые нестабильностью сопротивлений г, и г^, значительно превосходят погрешность, обусловленную мощностью помехи Рщ- В связи с этим всегда стремятся обеспечить условие <С г^, т. е. фактически режим холостого хода, при котором выходной величиной цепи, несущей информацию об измеряемой величине, является изменение напряжения. В частном случае, когда при отсутствии измеряемой величины выходное напряжение цепи равно нулю, изменение напряжения равно выходному напряжению. Входной величиной является относительное изменение сопротивления плеч измерительной цепи. Тогда, в соответствии с изложенным, функция преобразования цепи (2.10) где t/вых - выходное напряйсение измерительной цепи; е^, - относительное изменение сопротивления плеч измерительной цепи; иц - чувствительность измерительной цепи. Определим чувствительности перечисленных выше измерительных цепей. ; Делитель напряжения с одним рабочим плечом. Пусть под действием измеряемой величины изменяется сопротивление (см. рис. 2.6, а). При отсутствии измеряемой величины напряжение, снимаемое с сопротивления z. где = j/rf Л- х] - модуль полного сопротивления первого Плеча делителя; = Vrl-\-xl - кодуль полного сопротивления второго плеча делителя; г^, г^, х^, х^ - активные и реактивные сопротивления плеч делителя, 2* 35 Обычно плечи измерительной цепи изготовляют из одинаковых по конструкции преобразователей, для которых выполняется условие 2 = nri и - пх, где п - любое действительное число, большее нуля. Поэтому полное сопротивление делителя напряжения определяется суммой модулей полных сопротивлений плеч: Z == Viri+rr + ixi + xf = l/ (ri + nrif+ (Xi + nXi) = = (l+n)l/rf + x2=(l+n)Z, = Z,+n2,= И фазы напряжений на сопротивлениях плеч будут одинаковыми. Дальнейшие преобразования проведены с учетом этих условий. Под воздействием измеряемой величины сопротивление плеча делителя напряжения изменится на ZjE и станет, равным Zi (1 + + Ej), что приведет к изменению напряжения на сопротивлении Zj. Это изменение напряжения соответствует изменению сопротивления и является, таким образом, параметром, несущим информацию об измеряемой величине. Поэтому изменение напряжения на сопротивлении - выходная величина делителя напряжения, будем называть ее выходным сигналом. Величина выходного сигнала и...=f/; -1/. = -(гтатг (1 + - где и'г - падение напряжения на сопротивлении Zj (1 -f е^). После соответствующих преобразований получим где El - относительное изменение сопротивления; k = z/z - коэффициент симметрии делителя. Аналогично, если под воздействием измеряемой величины изменяется сопротивление z, то где Eg - относительное изменение сопротивления z. Если El < 1 и Ег <С 1, то для функции преобразования делителя напряжения с одним рабочим плечом можно записать t/s.. = c/E. (2.13) Выражение Llkl(k-\- \у есть чувствительность делителя напряжения с одним рабочим плечом: S=-Uklik+\f. (2.14) Из (2.14) видно, что чувствительность делителя напряжения определяется величиной напряжения питания и коэффициентом симметрии делителя и не зависит от значений сопротивлений плеч. Чем больше напряжение питания, тем больше чувствительность делителя. Делитель напряжения с двумя рабочими плечами. В этом случае под действием измеряемой величины изменяются оба сопротивления, причем, если одно сопротивление увеличивается, то другое уменьшается. Пусть сопротивление увеличилось на ze, а сопротивление уменьшилось на ZgEg (см. рис. 2.6, а). Тогда, аналогично предьщущему, можно найти функцию преобразования делителя напряжения с дву.мя рабочими плечами в следующем виде: При кяа \, El 1 и Ео С 1 функция преобразования упрощается: fBb,x = ifTTW (ei + £2). (2.16) Как видно из (2.16), чувствительность делителя напряжения для этого cjriy4aH соответствует выражению (2.14). Увеличение выходного сигнала с делителя происходит не за счет увеличения чувствительности делителя, а за счет дополнительного изменения сопротивления второго плеча. В этом случае выходной величиной является сумма относительных изменений сопротивлений обоих плеч и функция преобразования (2.12) является частным случаем функции преобразования (2.15). Мостовая цепь с одним рабочим плечом. Пусть при отсутствии измеряемой величины мостовая цепь находится в равновесии, т. е. zjz = Zg/z4 = k (рис. 2.6, б), а при действии измеряемой величины изменяется сопротивление на величину ze, и на выходе цепи изменяется напряжение. Такое изменение напряжения равно выходному напряжению (выходному сигналу) [5] Разделив числитель и знаменатель на zz, после преобразований получим [Г -//- ®1 <еых - Следовательно, функция преобразования мостовой цепи с одним рабочим плечом такая же, как и функция преобразования делителя напряжения с одним рабочим плечом [см. (2.11)]. Следует еще раз подчеркнуть, что в случае делителя напряжения выходной сигнал равен изменению напряжения на сопротивлении Zj, а в случае мостовой цепи - выходному напряжению мостовой цепи. Аналогично можно показать, что в случае изменения сопротивления функция преобразования мостовой цепи будет соответствовать выражению (2.12). Если рабочим сопротивлением будет Zg, то функция преобразования будет иметь вид (2.11), только с обратным знаком, а если рабочим сопротивлением будет z, то функция преобразования будет иметь вид (2.12) с обратным знаком. Естественно, что и выражение для чувствительности мостовой цепи будет иметь такой же вид, как для делителя напряжения. Таким образом, мостовая цепь с одним рабочим плечом с точки зрения функции преобразования и чувствительности подобна функции преобразования цепи делителя напряжения с одним рабочим плечом. Опуская рассмотрение мостовой цепи с двумя рабочими плечами, рассмотрим случай четырех рабочих плеч. Мостовая цепь с четырьмя рабочими плечами. В этом случае, если под действием измеряемой величины сопротивления Zi и увеличиваются на ZjE и Z4E4 соответственно, а сопротивления z и 23 - уменьшаются на zeg и ZgE-a, величина выходного сигнала [5 ] и -1] +gi)4(l+e4)-Z2(l - ег)гз(1 - Вз) . [2i (1 -f El) + г-Л 1 - 82)J [Z3 (1 - 83) + Z4 (1 -f Выполняя деление числителя и знаменателя на и преобразования, получим /; f / (ei + 62 + 6. + 84 + 8164 - Вгвз) (9 \7\ (k+\)(k+\ + kzi-E~ + Е4) + (*ei (Е4 - йез) /- Нетрудно убедиться, что ранее полученные функции преобразования измерительных цепей являются частным случаем функции преобразования (2.17). Например, функция преобразования делителя напряжения с двумя рабочими плечами может быть получена из (2.17), если положить 63 = 64 = 0. При этих условиях 1! г; fe ei + eg Т. ~е. в точности соответствует (2.15). При El < 1, 62 <С 1, Eg < 1 и Е4 <С 1 выражение (2.17) можно представить следующим образом: Bb,x-(feip (в1 + Е2 + Ез + в4). (2.18) Сравнивая полученное выражение с (2.10), можно видеть, что чувствительность мостовой измерительной цепи S = W(A+1) (2.19) а относительное изменение сопротивлений плеч мостовой цепи = ei-j-Еа + Ез + Ё4. (2.20) 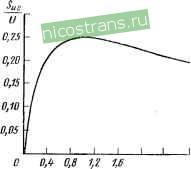 Рис. 2.7. Зависимость чувствительности измерительной цепи от коэффициента симметрии Следовательно, функция преобразования (2.17) является общим выражением функции преобразования наиболее распространенных измерительных цепей - делителя напряжения и мостовой цепи, независимо от того, сколько плеч и какие из них в измерительной цепи являются рабочими. Увеличение числа рабочих плеч в измерительной цепи увеличивает величину выходного сигнала, но не изменяет ее чувствительность. Чувствительность делителя напряжения и мостовой цепи определяется одним и тем же выражением и зависит от величины напряжения питания и соотношения сопротивлений плеч измерительной цепи и не зависит от значений сопротивлений и числа работающих плеч. С увеличением напряжения питания измерительной цепи пропорционально увеличивается ее чувствительность. С увеличением коэффициента k измерительной цепи чувствительность сначала увеличивается, а потом уменьшается. На рис. 2.7 представлена зависимость чувствительности цепи от коэффициента k при постоянном напряжении питания. Из рисунка видно, что чувствительность измерительной цепи максимальна при А = 1 и равна 0,25t/, причем максимум кривой является пологим и отклонение коэффициента от оптимального значения несущественно изменяет чувствительность цепи. Так, при сопротивлениях плеч, отличающихся в 1,5 раза {k = 1,5 или k = 0,66), чувствительность цепи снижается всего на 4% от максимальной. Резкое уменьшение чувствительности измерительной цепи происходит при k <0,4. Вообще говоря, как показывает общее выражение (2.17), функция преобразования измерительной цепи нелинейна. Для выяснения характера нелинейности функции преобразования на рис. 2.8 представлены зависимости выходного сигнала от относительного изменения сопротивления плеч для наиболее часто встречакэЩихся в практике случаев, рассчитанные по формуле (2.17). Кривые рис. 2.8, а построены для случая работы одного плеча измерительной цепи, кривые рис. 2.8, б - для случая работы двух плеч. Как видно из рис. 2.8, б, линейная функция преобразования Получается при = -- е. и = 1. Максимальная нелинейность наблюдается в случае работы двух противоположных плеч. Наименьшая - в случае работы двух смежных плеч. Ниже будут даны условия, при которых зависимость между относительным Изменением сопротивления и выходным напряжением линейна. и
D,U 0,6 0,8 1,0 0 0,2 0Л 0,6 0,8 £r a) 6) Рис. 2.8. Зависимости выходного сигнала от относительного изменения сопротивлений плеч для наиболее употребительных случаев: о - двух рабочих плеч; 1, 2 - при е^, = ej Н- ва и ft = I; ft = 0,5 (fe = 2) соответ, етвенно; 3, 4, 6 - при = 8, + н * = 0,5; ft = I, ft = 2 соответственно; 5,7 - при = El Ч- El и ft = 1; k = 0,5 (ft = 2) соответственно; б - одного рабочего плеча; 1,2.3 - при = Eg и ft == 0,5, ft == I; ft = 2 соответственно; 4 5 - при Е^ = е, и ft 1; k - 0,5 (ft = 2) соответственно Анализируя функции преобразования разобранных выше измерительных цепей, можно сказать, что последние являются не только преобразователями относительного изменения сопротивления в величину выходного сигнала, но и, как следует из {2.Щ и (2.18), являются сумматорами величины относительных изменений сопротивлений. Эта сумма однозначно характеризует величину выходного сигнала измерительной цепи и может быть измерена в настоящее время простыми и доступными средствами. Поэтому в тех случаях, когда в тем или ином измерительном устройстве осуществляется измерение не величины выходного напряжения, а величины относительного изменения сопротивления измерительной цепи, последнюю следует рассматривать как сумматор относительных изменений сопротивления. При этом получается определенный выигрыш по точности, массе и размерам измерительного устройства, так как отпадает требование к стабильности источника питания измерительной цепи. Таким образом, наиболее употребительные измерительные цепи датчиков, как измерительные преобразователи относительного изменения сопротивления в напряжение, имеют общие выражения функции преобразования и чувствительности, а делитель напряжения является частным случаем мостовой цепи. Следует заметить, что при невыполнении условия г, < Га измерительная схема датчика может быть представлена как последовательное соединение двух измерительных преобразователей измерительной цепи, преобразующей относительное изменение 40 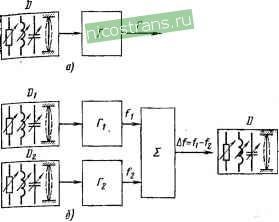 Рис. 2.9. Структурные схемы некоторых измерительных цепей, преобразующих параметры электрической цепи датчика в частоту: а - недиффереициальной, б - Дифференциальной с двумя датчиками; t - дифференциальной с одним датчиком Г-. Г, сопротивления в выходное напряжение, и преобразователя напряжение - ток, функция преобразования которого / = f/,b,x/(/ , + 0. где / - сопротивление нагрузки, г, - внутреннее сопротивление измерительной цепи (г,- = /-в^х, подробнее см. ниже гл. 3). Если не выполняются условия = пг и = л; то величины, входящие в приведенные выше выражения, следует рассматривать как комплексные. В последнее время, в связи с успехами электроники, большое распространение получили измерительные цепи, которые преобразуют параметры электрической цепи датчика в частоту. В качестве входного параметра в данном случае выступает сопротивление, индуктивность либо емкость (или жесткость для струнных датчиков), а выходным параметром такой цепи является частота электрического сигнала. По исполнению эти цепи бывают обычного и дифференциального типа (рис. 2.9). Следует отметить, что способов изменения параметров электрической цепи может быть несколько. Например, электрическое сопротивление цепи R - pt/s может меняться за счет изменения удельного сопротивления р, длины / и площади поперечного сечения s проводника-электрическая емкость С = es/d - за счет изменения диэлектрической проницаемости е, площади обкладок s и расстояния между ними d; индуктивность цепи L == rops - за счет изменения магнитной проницаемости р, площади поперечного сечения s и длины магнитопровода /. Однако информативным параметром выходного сигнала электрической цепи во всех случаях является частота. Не загружая читателя дополнительными выкладками, приведем общую таблицу функций преобразования измерительных цепей. функции преобразования некоторых измерительных цепей Схема Входная величина Выходная величина Напряжение Частота Относительная девиация частоты и Вых Ег = + е., == при 61 <с 1; ь'з 1; 1 (61+62)  2 = 63 = Z3 AZ4 £nbix = f 61 + £2 + 63 + k + l A + 1 + fcei - + 64 + 6184 - EgEg - £.2 - Абз J-b-4-j- Л л = (ftei - Eo) (f4 - з) при ei с 1; e-s < 1; 8s < 1; 64 1; * ~ 1 k f/Bb,x = f (ТрГ)-.(;1 + -з + =з+в.: Продолжение Схема Входная величина Выходная величина Напряжение Частота Относительная девиация частоты с 0)0 = 2(1 +8) при е < 0,1 S2 = + - где р == yL С Acq 1 Р^-(1 + Л^1) при 8 < 0,1 А(о 2 и ~ - (г + Arj)2 при е <0,1 2.3. НЕКОТОРЫЕ ОБЩИЕ ПРИЕМЫ АНАЛИЗА ФУНКЦИЙ ПРЕОБРАЗОВАНИЯ ИЗМЕРИТЕЛЬНЫХ УСТРОЙСТВ Одной из основных задач анализа любого измерительного устройства является определение погрешностей. Совершенно ясно, что каждый этап преобразования связан с теми или иными потерями информации об измеряемой величине, характеризуемыми погрешностями. Задача разработчика заключается в том, чтобы оценить эти погрешности и принять решение по оптимальному синтезу всей структуры измерительного устройства. Если известна функция преобразования измерительного устройства, то эта задача решается сравнительно легко приемами, описанными в работе [1]. Так относительная погрешность измерительного устройства, описываемого, например, функцией преобразования (2.5), представляет собой алгебраическую сумму относительных погрешностей отдельных измерительных преобразователей, из которых оно синтезируется (подробнее см. ниже гл. 14): Ту = 71 + Т2 + . + Уп-i + Уп. (2.21) Подбирая измерительные преобразователи с погрешностями, величина и знак которых известны, можно сумму (2.21) минимизировать. Так, для получения минимальной чувствительности устройства к температуре его синтезируют из преобразователей с такими температурными характеристиками, чтобы сумма (2.21) была минимальной. Если это не обеспечивает требуемой величины погрешности, то в цепь измерительного преобразования вводят преобразователь, основной функцией которого является не преобразование измеряемой величины, а минимизация суммы (2.21). К таким преобразователям относятся различные компенсационные элементы и корректирующие цепи [см. ниже, параграф 3.1 I. Функция преобразования измерительного устройства позволяет определить и минимизировать не только погрешности от дестабилизирующих факторов, но и погрешность от нелинейности. Приемы анализа функции преобразования измерительного устройства для этого случая завися, от вида функции преобразования. Так очень часто функция преобразования измерительного устройства может иметь следующий вид [см., например, (2.11)]: Такое преобразование нелинейно, и требуется определить величину нелинейности и условия, при которых величина нелинейности не превышает допустимую. Ясно, что при X С а преобразование (2.22) линейно: = {К/а)Х. (2.23) 1 2 3 4 5 6 7 ... 48 |