
|
| |
 |
Главная » Мануалы 1 ... 3 4 5 6 7 8 9 ... 48
Рис. 3.3. Кривые нелинейности измерительной цепи датчика при одном активном плече: i - Vi; ft = 2,0 (\\\ h = 0,5); 2 - у^; k = 1,0 (v.; k = 1,0); 3 - Уи k = 0,5 (Vi; k = 2,0); 4 -y; k = 2,0 (7з: k = = 0,5); 5 - Vil fe 1.0 (ь: * = 1,0): <? - Vj; fe = 0.5 (vs: ft = 2) -0,1 Рис. 3.4. Кривые нелинейности измерительной цепи датчика при двух активных плечах: -~yi,i- -т..4: ft = 0,5 (ft =2); ft = 2; 4-у1,, ft = 0,5 (V3 ; ft = 0,5): 5 - Vg ; ft = 1: <? - Vg : ft = 0,5 (ft = 2) Очень часто в тензорезисторных датчиках относительные изменения сопротивлений плеч одинаковы. При этих условиях выражения для вычисления нелинейности упрощаются: 71,2 (к + \) + г(к-\) (k + \). 71,4 = - 72.3 = Ч- при = Eg = е; Jk) Ри з = е4 = е; при El = 64 = е; 1)(1 -f е) + (й--1)(1-8) + при Eg = Eg = е. (3.15) На рис. 3.4 представлены кривые нелинейности, рассчитанные по выражениям (3.15) при различных коэффициентах симметрии. Из этих кривых следует, что наименьшая нелинейность функции преобразования получается при работе двух соседних плеч (кривые 7i 2 й 7з, 4) и равна нулю при коэффициенте симметрии, равном единице. Отклонение коэффициента симметрии от значения k = 1 увеличивает нелинейность. Наибольшая величина нелинейности получается при работе двух противоположных плеч, о -0,1 -0, причем, если сопротивление плеч увеличивается (см. кривые 71,4), то изменение коэффициента симметрии изменяет нелинейность примерно в 2 раза меньше, чем в случае, когда сопротивление плеч уменьшается (см. кривые Уг.з)- Для тензорезисторных датчиков, у которых относительное изменение сопротивления одного плеча обычно не превышает 0,1, при k = 1 величина нелинейности составляет -3%, если рабочими являются второе и третье плечи (сопротивление плеч уменьшается), и -~6%, если рабочими являются первое и четвертое плечи (сопротивление плеч увеличивается). Из сравнения нелинейности функций преобразования цепи с одним и двумя рабочими плечами видно, что при двух рабочих плечах с максимальными нелинейностями общая нелинейность меньше, чем удвоенное значение нелинейности при работе цепи с одним рабочим плечом, т. е. при работе цепи с двумя рабочими плечами в любом случае нелинейность меньше, чем при работе с одним рабочим плечом. Таким образом, можно сделать следующие выводы, которые необходимо использовать при проектировании измерительных цепей тензорезисторных датчиков с минимальной нелинейностью функции преобразования: для получения линейной характеристики необходимо выбрать измерительную цепь с коэффициентом симметрии, равным 1, и с двумя (соседними) или четырьмя рабочими плечами, относительные изменения сопротивлений которых одинаковы; если по условиям работы датчика невозможно получить относительные изменения сопротивлений плеч измерительной цепи разного знака, то следует так проектировать цепь, чтобы сопротивление плеч уменьшалось и коэффициент симметрии был k = \; если по каким-либо причинам измерительная цепь должна быть с одним рабочим плечом, то это плечо необходимо выполнять так, чтобы его сопротивление увеличивалось, а коэффициент симметрии был k < \, если рабочим является первое плечо, и > 1, если рабочим является четвертое плечо. Следует заметить, что нелинейность определяли методом проведения линейной характеристики, касательной к фактической в начале координат, а он не является оптимальным [130]. Однако применение другого метода не изменяет соотношений между нелинейностями для различных случаев измерительной цепи, и поэтому выводы, сделанные выше, остаются справедливыми независимо от того, как определялась нелинейность функции преобразования измерительной цепи. 3.4. ФУНКЦИЯ ПРЕОБРАЗОВАНИЯ ИЗМЕРИТЕЛЬНОЙ ЦЕПИ С КАЛИБРОВКОЙ Определяя функцию преобразования измерительной цепи, работающей с калибровкой, отметим следующее. Перед подключением калибровочного резистора Гк (см. рис. 3.1) к одному из плеч измерительной цепи (перед калибров- 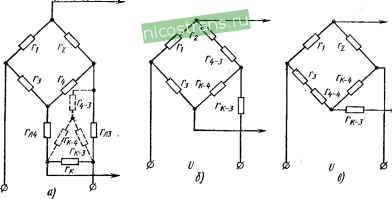 Рис. 3.5. Схемы преобразования при включении калибровочного сопротивления КОЙ) значения параметров элементов цепи те же, что и перед измерением (перед воздействием на датчик измеряемой величины), так как калибровка и измерение по времени практически совпадают. В соответствии с ТУ на большинство тензорезисторных датчиков измерение проводят не позднее, чем через 5 мин после проведения калибровки, и элементы измерительной цепи выбирают так, чтобы за это время значения их параметров не изменялись. И далее, при включенном калибровочном резисторе эквивалентно изменяется только сопротивление плеч измерительной цепи и сопротивления цепи, в которую включен калибровочный резистор. На рис. 3.5, а показана часть измерительной цепи, представленной на рис. 3.1. Сопротивление г^ включает в себя компенсационное сопротивление, сопротивление жилы кабеля и добавочное сопротивление. Сопротивление - сопротивление четвертой жилы кабеля. Преобразуем схему, данную на рис. 3.5, а, принимая = 0. как показано на рис. 3.5, б (треугольник сопротивлений - .13 - к заменен звездой г, Гк-з - к-4)- В этой схеме лз + -4 + -к' к-3.= f кГ ля /л8 + -4 + -к' Как видно из схемы рис. 3.5, б, сопротивление второго плеча увеличилось на = Г4 з, а сопротивление четвертого плеча уменьшилось на величину Относительное изменение сопротивлений второго и четвертого плеч, обусловленное включением сопротивления г^.. составит , . Д/-2 Д/4 - 2к + 4 ------ Подставив значения Ага и АГ4 и проведя соответствуюра.ие преобразования, окончательно получим ->A±Jj!lSl±JjtA, (3 16) ji3 + 4 + k Если мост имеет симметрию, при которой = г^, то Ч-/ ЛГ. (3.17) ЛЗ -- 4 -г К Аналогично можно получить относительное изменение сопротивлений моста, если rg = О и = 0. Схема для этого случая представлена на рис. 3.5, в. В этой схеме сопротивление плеча увеличивается на Л4 + 4 + К а сопротивление уменьшается на АГ4 = Г4 - Гк 4 = Г4 - Тогда относительное изменение сопротивлений второго и четвертого плеч для этого случая будет . . Дгз . Д/-4 . ь^к - зк ~г - ~- + > ,.Г4ул4(1+уз) (3,8) Л4 Г 4 Т к Получили выражение, аналогичное (3.16). Значит, влияние сопротивлений r g и r4 одинаково и для случая, когда г„з =f О и -Л4 0: /-4 + ПЗ (1 + rjrj) + (1 + Г4А3) Л4 1/2(-лЗ--л4) +4--к Из выражений (3.16) и (3.18) следует, что на относительное изменение сопротивлений моста, обусловленное включением калибровочного резистора, влияют только сопротивления тех жил, к которым подключены калибровочный резистор, и для равноплечего моста Влияния г^з и Гл4 на величину е^ численно равны. Включение калибровочного резистора, как было сказано выше и как видно из рис. 3.5, б и 3.5, в, эквивалентно изменяет также сопротивления в третьей и четвертой жилах кабеля, которые определяют чувствительность измерительной цепи. Однако, как показывает расчет, при реальных значениях параметров измерительной цепи тензорезисторного датчика это изменение меньше 0,08% и при определении функции преобразования им можно пренебречь. Поэтому функция преобразования измерительной цепи тензорезисторного датчика при подключении калибровочного резистора может быть получена из выражения (3.9) заменой выходного сигнала моста, получающегося от воздействия нагрузки, выходным сигналом, получающимся от включения калибровочного резистора 11 р вх н k v + -лз (1 + rjrj) + r (1 + rjr) По условиям определения сопротивления калибровочного резистора величина выходного сигнала, получающаяся при действии на датчик измеряемой величины, должна быть равна величине выходного сигнала, получающегося при включении калибровочного резистора сопротивления: Уцых = к- Подставляя значение <7вых /цых.л из (3.9), а значение tBbiN. к ~ выу. из (3.19), получим функцию преобразования измерительной цепи с калибровкой: - 1/2 (.,3 + .,j+ + ----1 + -\- ез г Ч. (3.20) Как видно из (3.20), режим работы измерительной цепи с калибровкой обеспечивает независимость отсчета от следующих величин: ЭДС источника питания; внутреннего сопротивления источ' ника питания; сопротивления первой и второй соединительных жил; входного и выходного сопротивлений измерительной цепи; сопротивления нагрузки. Независимость функции преобразования (3.20) от величины внутреннего сопротивления источника питания позволяет применять измерительную цепь датчика в указанном режиме как с источником тока, так и с источником напряжения. Этот вывод является существенным, так как представляется возможным определить величину компенсационного сопротивления чувствительности Га независимо от типа выбранного источника питания. Далее (3.20) показывает, что однозначность функции преобразования определяется однозначностью сопротивления Г4 плеча, к которому подключены калибровочный резистор, и однозначностью сопротивлений, включенных в соединительные жилы (третью и четвертую) между точками подключения калибровочного резистора и вершинами моста. Так как в тензорезисторном датчике в один соединительный провод включено сопротивление Га, которое значительно больше сопротивления соединительных проводов, то из выражения (3.20) для равноплечего моста и малых е (г^ > г^) получим (1/к) (-4 + 2rJ = ei + 62 + ез + е^. (3.21) Если компенсационное сопротивление отсутствует, то можно принять, что Глз - л4 = л. и тогда из (3.20) для равноплечего моста и Гк > Г4 > Гл имеем (I/-k) (-4 + 4гл) = е, + £2 + ез + е^. (3.22) Это выражение учитывает сопротивление в обеих соединительных жилах, поэтому в числителе перед г„ стоит 4, тогда как в (3.21) учитывается сопротивление только в одной жиле. Из (3.22) может быть определена погрешность, вносимая изменением сопротивления жилы кабеля, равным 1 Ом. Пусть при аттестации датчика (I/O (/-4 + 40 = ек, а при измерении (1/к)(-4 + 4г;) = е;;. Тогда относительное изменение сопротивления, обусловленное изменением сопротивления жилы кабеля, составит Ае = е'к - е;, = (А/г^) [г - г^) и в процентах на 1 Ом изменения сопротивления жилы кабеля погрешность v.-Trfeioo. (3.23) Из полученного выражения видно, что погрешность, обусловленная неравенством сопротивлений жил при аттестации и измерении, зависит только от значения сопротивления г^. При Г4 = 700 Ом эта погрешность составит 0,57%/Ом, т. е. при увеличении сопротивления каждой жилы кабеля на 1 Ом появляется систематическая погрешность, равная 0,57%. Следует отметить, что изменение сопротивления кабеля практически линейно изменяет погрешность, пока 4гл < г^. Таким образом, измерительная цепь с калибровкой имеет ряд преимуществ по сравнению с измерительной цепью без калибровки, обусловленных независимостью функции преобразования от ЭДС и внутреннего сопротивления источника питания, сопротивления нагрузки, входного и выходного сопротивлений измерительной цепи и сопротивлений жил (первой и второй) соединительного кабеля. Эти преимущества необходимо учитывать при выборе измерительной цепи тензорезисторного датчика. Расчет калибровочного сопротивления для выбранной измерительной цепи выполняют по формуле, полученной из (3.20), или для равноплечего моста с компенсационным сопротивлением чувствительности по формуле, полученной из (3.21): si+ea + eg + e Расчет погрешности, обусловленной неравенством сопротивлений жил при аттестации и измерении, производится по (3.23). Следует заметить, что эта погрешность может быть учтена внесением поправки в результат измерения, так как является систематической. 3.5. РАСЧЕТ ТЕРМОЗАВИСИМЫХ ЭЛЕМЕНТОВ ИЗМЕРИТЕЛЬНОЙ ЦЕПИ Компенсационное сопротивление чувствительности. Термокомпенсация чувствительности тензорезисторных датчиков наиболее удобно осуществляется введением термозависимого элемента в измерительную цепь. В общем случае все измерительные преобразователи, входящие в тензорезисторный датчик, могут изменять свою чувствительность при изменении температуры. И для того, чтобы результирующая чувствительность (чувствительность датчика) не зависела от температуры, не обязательно добиваться независимости от температуры каждого измерительного преобразователя датчика. Достаточно ввести в цепь какого-либо преобразователя один термозависимый элемент с такими характеристиками, которые обеспечивали бы постоянство чувствительности датчика в заданном температурном диапазоне. Таким элементом для тензорезисторного датчика является термозависимый резистор г^, в измерительной цепи, включаемый обычно в диагональ питания моста (рис. 3.6, а). Схема, приведенная на рис. 3.6, а, имеет термозависимый резистор Га, включенный в диагональ питания моста. Если температурный коэффициент чувствительности датчика ад, то можно так выбрать величину сопротивления г„ и его температурный коэффициент сопротивления а^, что чувствительность датчика не будет зависеть от температуры. При температуре to чувствительность датчика со схемой (рис. 3.6, а) может быть записана следующим образом: где 5д - чувствительность датчика; г^ - входное сопротивление моста; r - эквивалентное сопротивление цепи питания без компенсационного сопротивления Га- При изменении температуры датчика на величину At изменится чувствительность датчика, сопротивление и, в общем случае, входное сопротивление моста г^, температурный коэффициент 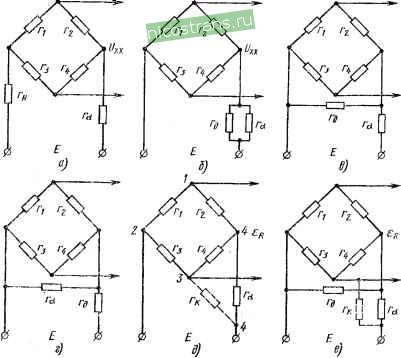 Рис 3.6. Возможные схемы термокомпенсации чувствительности сопротивления которого обозначим через а^. При этих условиях чувствительность датчика 5 -= 5Л1 + л ДО -ТТЛ-1 !/ л. . (3.25) Решая совместно (3.24) и (3.25), получим а - вх г + д ( + с АО - -ад (1+аг А/) к --ад (1А<) (3.26) /-a = (-Bx + 0-- (3.27) Кк- ад Выражение (3.28) показывает, что термокомпенсация по схеме рис. 3.6, а возможна, если знаки оэ и одинаковы, и эффективна при кк! > ад. При а,. = О При = 0; г„ = О Схема, приведенная на рис. 3.6, б, отличается от схемы рис. 3.6, а тем, что при заданном г^. можно регулировать (сопротивлением Гд) эквивалентный температурный коэффициент сопротивления. Величина для этой схемы, определенная аналогично предыдущему, будет д(1 Ч-к^др -. (3.29) к - г - Д (1 -f г до - -- Д (1 + А ДО При = о Примечательно, что влияние сопротивления Гд на величину сопротивления Га осуществляется не через температурный коэффициент сопротивления г„, параллельно которому включается Гд, а через температурный коэффициент датчика ад. Для схем, показанных на рис. 3.6, в и 3.6, г, выражения для компенсационных сопротивлений получены аналогично приведенным выше: для схемы рис. 3.6, в (а.-а. Y: ,-(3-31) при а^ = о для схемы рис. 3.6, г [- Кк - Кд (1 + к ДР] ГвхГд при а^ = о ад(Ц-акДО (3.32) (3.33) (3.34) при ак <С 1 А-а = Гзке~ ~ (3.35) В этих выражениях г рхГд ех + Гд Компенсационные сопротивления Га для случая, когда измерительная цепь работает с калибровкой, можно определить, если будет найдена зависимость 8 от калибровочного сопротивле- ния г^. Так, для схемы, приведенной на рис. 3.6, д, использовав выражение (3.16), получим При Га = Г4 При включении компенсационного сопротивления Га в линию 3 выражение для 8 получается аналогичным: При Гд = Г1 (мост равноплечий) получается выражение (3.37). Включение компенсационных сопротивлений в другие линии (линии, не охватываемые калибровочным сопротивлением) величину 8,. не изменяет. Попытка применения схем, данных на рис. 36, в и 36, г, для работы с калибровкой успеха не приносит, так как выражение для 8к от величины сопротивления, подключенного к диагонали питания, не зависит. Так для схемы рис. 3.6, е (схема рис. 3.6, в с калибровкой) относительное изменение сопротивления, получающееся за счет подключения г^, равно относительному изменению сопротивления схемы 3.6, д [см. выражения (3.36 и (3.37)]. Возвращаясь к определению Га, для схемы рис. 3.6, д, учитывая выражение (3.20), запишем 8i + 82 + 83 + 84 = 8 НО 81 + 82 + 83 + 84 = 5дХ. Следовательно, используя (3.36), можно записать Га, + -Ь /-к При изменении температуры изменяется чувствительность датчика, компенсационное сопротивление и сопротивления плеч моста. Учитывая, что в тензорезисторном датчике Гк > и что отношение rjr мало зависит от температуры, так как плечи моста выполняют из тензорезисторов одного типа (и даже одной партии), получим при изменении температуры на величину At 5д(1 +адД?) о^(+, кД0(1+-4/2) + /-.(1+ И0 (3 40) где 4 - температурный коэффициент сопротивления четвертого плеча. Разделив это выражение на (3.39), получим 1 L Л/ - Га(\+а^М)(\+ г Jr.) + /-4(1 + aAt) SX = + . (3.39) 1 ... 3 4 5 6 7 8 9 ... 48 |