
|
| |
 |
Главная » Мануалы 1 2 3 4 ... 6 электропривод роботов и манипуляторов Для наиболее полного (решения задачи комплексной ав-томатазащсти техналопичеоних и пр10изв101Д'СТ1ве1Нных процессов (безлюдная те.хнология) современные роботизированные участки гибкие автоматизированные производства (ГАП) требуют модульного и однотипного выполнения как элементов используемого привода, так и привода в целбм при его максимальной конструктивной и функциональной интеграции с другими компонентами технологического оборудования. Многокоординатный дискретный электропривод полностью отвечает этой концепции и в р.яде случаев конструктивно сливается с .производственным участком. 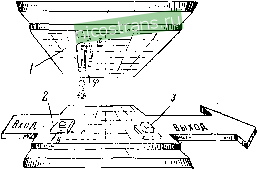 Рис. 1.1. Участсж'РАП На рис. 1.1 схематически показан участок ГАП, обеспечивающий произвольную взаимную комбинацию движений Инструмента или схвата манипулятора 1, платформы с основной деталью 2 и ;платформы с магаЗ'Ином всП'Омогатель-ных деталей 3. Линейные и поворотные координаты приводов построены однотипно и одновременно выполняют функ- ции конструктивов рассматриваемого производственного участка. Объединение транспортных и производственных операций и возможность х варьирования как необходимые условия реализации гибкого лроизводственного процесса делают неизбежным программное управление с развитой многоканальной, иерархически поетроенной структурой связей. Поэтому в центре нашего внимания будут задачи выбора и проектирования привода с программным управлением. При высокой степени определенности технологических процессов или производственного цикла привод может строиться по разомкнутой структуре, что обеспечивает ему возможность смены программ без наладочных работ. За-мыкание такой программной структуры необходимо либо при значительной вариации условий эксплуатации, либо с целью расширения диапазона рабочих скоростей и ускорений. В этом случае, как показано в [3], дискретный электропривод становится полным аив1Ива,ле1нтом [беоконтажтного привода постю'Яиного тока. Это дает возможность опираться на хорошо разработанную теорию синтеза приводов постоянного тока, уделив внимание л,ишь некоторым частным вопросам, связанным с конструктивными особенностями и параметрами применяемых ШД. Таким образом, в настоящем пособии выделены общие вопросы проектирования (гл. 1), которые позволяют Правильно выбрать гл!авные размеры собствеиво двигателя, согласовать его с нагрузкой непосредственно или через редуктор и оценить требования, предъявляемые к силовой и управляющей части привода. При этом выделяются две основные постановки. В первой из них предполагается, что привод построен с использованием инвертора напряжения, не позволяющего в общем случае формировать строгие законы изменения токов во всем рабочем диапазоне. Задача проектирования в этом случае решается лерестроевием динамических моделей (гл. 2), что позволяет получить обобщенные динамические показатели, характеризующие собою область физической реализуемости требуемых программных движений. Одновременно эти показатели используются при выборе главных размеров и параметров привода. Вторая постановка предполагает, что привод построен с использованием инвертора тока, который обеспечивает формирование токов, требуемых программой движения. В этом случае оценка рабочих диапазонов и выбор главных размеров двигателя существенно упрощаются. Специфика проектирования при таком подходе сводится к расчету и построению инвертора тока при известных значениях постоянных В|ремени цепей фаз, вовиикающих ЭДС я требованиях к точности воспроизведения программного движения (гл. 3). Применительно к обеим постановкам управляющая часть привода должна обеспечить оптималшые или квазиопти-мальные алгоритмы, реализующие требуемые траектории движения при назначенных уровнях допустимых ошибок. Материалы 1-й-3-й глав содержат наиболее существенные сведения о законах управления. В 4-й главе дается представление о средствах микропроцессорного управления при реализации этих законов. iB приложении содержатся безразмерные и физические параметры современных ШД, которые позволяют при найденных главных размерах ШД для проектируемого привода обоснованно выбрать наиболее близкий по -своим параметрам серийно выпускаемый двигатель. Предлагаемые материалы опираются на физические представления и методы математического описания, развитые в учебном посо1бии Шпатовый э.лект1роприв1одв робототехнике [3], знакомство с которым необходимо для понимания материала. 1. ОБЩИЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ 1.1. Постановка типовых задач проектирования Шаговый привод является в общем случае разомкнутой следящей системой, которая обеспечивает непрерывную отработку строго дискретного сигнала. Непрерывное движение вала возникает из-за ограниченности величин и градиентов подводимых энергий, т. е. в результате фильтрующих свойств ШД и ошибок в воспроизведении сигнала. По условиям сохранения устойчивости движения ошибки не могут превосходить некоторых предельных значений. Этим накладываются ограничения на ускорения, скачки программного задания положения и скорости, диапазон изменения скорости и частоты команд. В центре задачи проектирования шагового привода, как бы она ни ставилась в конкретном случае, всегда оказывается поиск и обоснование его внутренних сор-азмер-ностей, которые обеспечивали бы получение требуемых энергетических И динамических показателей при строгом соблюдении ограничений, наложенных на ошибки. Предельные значения ошибок и соответствующие им режимы работы ШД известны. Они являются функциями обобщенных параметров п, к, б, Цн и структурных особенностей привода, реализующих применяемые алгоритмы управления. Это обстоятельство облегчает .постановку задачи в общем случае, так как можно ограничиться оценкой предельных возможностей устройства, отступая на практике от найденных границ для создания запаса устойчивости в условиях нестабильности параметров и внешних воздействий. Проектное задание содержит: 1) сведенияоб исполнительном механизме, т. е. даны момент или сила сопротивления нагрузки Мп, Fn; момент инерции или масса нагрузки /н, т'в\ 2) требования к времени позиционирования (перемещения) на интервале пути бмех, л;мех или к траектории движения 0Mex = f(/), Хмех=/(0. нсскольким характерным траекториям или области реализации произвольных программных движеций, oipp а ничейной предельными ©заимосвя- ЗаННЫМИ значениями координат Омех.,ах(0. Шмех. тм(); Смех. max. {t)\ 3) ограничения на допустимые ошибки в положении Дбмех. доп И скорости ЛсОмех. доп/ 4) ВИД ВХОДНОЙ информации (унитарный или цифровой код); 5) дополнительные сведения об источнике питаиия, условиях эксплуатации или ограничения по мощности потребления, массогабаритным показателям, конструкции и т. п. Отметим, что для привода роботов характерны переменные значения момента сопротивления и момента инерции, но они обычно являются известными функциями пути М'н = :/1 (9 ех), /н = = [2(Эмех). Это не изменяет задачу построения строго заданного движения 6мех=/(/), но существенно усложняет ее при контурном управлении с неизвестной заранее траекторис1 движения. В этом случае шаговый лривод, замкнутый по положению и скорости, синтезируется как привод постоянного тока. Будем рассматривать проектирование н выбор разомкнутых структур привода, применительно к которым замыкание по положению является предельным переходом, позволяю- щим оценить границы изучаемого режима. Первая и наиболее простая постановка задачи проектирования предполагает, что двигатель дан и известны его па- раметры: максимальный момент Мтах, момент инерции ротора /р, число пар полюсов или зубцов ротора pn=Zr, число фаз т, вид коммутации (однополярная или разнополярная), сопротивление и индуктивность фазы и Ьф, ток фазы в статике /фном допустимый из тепловых соображений, максимальное потокосцепление фазы с магнитом или контуром возбуждения Wmax- Нсобходимо согласовать двигатель с исполнительным механизмом через редуктор или непосредственно, назначить электрический шаг а=2л/п, выбрать и рассчитать инвертор напряжения или тока, обосновать алгоритм управления и построить в соответствий с ним логичес--кую часть схемы привода. Усложнением этой постановки является предварительный выбор ШД по каталожным данным (см. приложение). Ориентировочные правила такого выбора сводятся к тому, чтобы приведенный к валу ШД момент сопротивления нагрузки составлял Л?н=Л1н'А^0,4М„, : а момент инерции / = = /н/1~/р. Полюсность двигателя и передаточное отношение редуктора i при этом ограничивают в соответствии с заданием статическую угловую ошибку arCSin Шн1М, а,с) а П П При жестких требованиях технического задания или проектирования ответственных установок таких простых соображений по выбору двигателя недостаточно. В этом случае возникают оптимизационные задачи выбора или полного проектирования ШД, отвечающего поставленному критерию оптимальности: .минимум массы, потребляемой мощности или ошибки позиционирования, максимум быстродействия и т.д. Главной составной частью подобных задач является определение главных размеров двигателя Dp, /р - диаметра и длины ротора вращающихся ШД, через которые находятся остальные параметры двигателя и обоснованно выбир-ается или исключается редуктор. Оцененный таким образом оптимальный ШД либо полностью рассчитывается и должен быть построен, либо позволяет выбрать по каталогу ближайщий по размерам и параметрам серийный образец. Рассмотрим за-чи выбора главных размеров вращающихся и линейных Кинематические преобразователи движения расширяют воз.можности оптимального проектирования. Однако использование механических передач нежелательно в прецизионных установках с большим числом степеней свободы движения. Jb линейном и многокоординатном модульном приводах механическое редуцирование исключено по самому их замыслу, так как они предназначены для непосредственной реализации сложных движений. Поэтому целесообразно рассмотреть принципиальные особенности безредукторного электропривода и тенденции изменения главных размеров и параметров двигателя при исключении редуктора^4 Таким образом, задачи выбора и оптимизации двигателя можно выделить в качестве са.мостоятельных. Основной оказывается задача построения силовой части привода и выбора структуры управления при известном ШД. Первым и общим для любого технического задания этапом ее решения является оценка физической реализуемости привода. При отрицательном результате необходимо выбрать и спроектировать другой двигатель или обоснованно изменить задание. Для оценки физической реализуемости требований задания осуществляется переход к относительным единицам и безраз-мероым Параметрам, что позволяет воспользоваться обобщенными показателями и характеристиками предельных динамических и установившихся типовых процессов, которые известны из решения полных или упрощенных уравнений дискретного электропривода [1-3]. Анализируя предельные показатели в некоторой области вариации параметров, одновременно получают сведения о целесообразности использования редуктора и необходимой степени форсирования электромагнитных процессов, что важно на следующем этапе три разработке инвертора нашряженш или тока. Даль-нейшие этапы проектирования существенно различаются в зависимости от требований задания. Первый этап. Задание не содержит определенных .программ движения, а нагрузка может изменяться в некоторых пределах по случайному закону. Привод должен в границах физической реализуе.мости осуществлять слежение за входной информацией, охарактеризованной типовыми видами команд. Синтез необходимых законов управления, соответствующих 1ИМ структур и уточнение требований к Параметрам инвертора сводятся к перестроению общей динамической модели привода. Частные модели, представленные полиномами или уравнениями регрессии, непосредственно связывают параметры привода, вид управления и характеристики движения, т. е. могут рассматриваться как уравнения проектирования. По существу на этом этапе решается та же зада- ча оценки физической реализуемости, но в более строгой и развитой постановке применительно к типовым, наиболее вероятным или наиболее трудным видам команд. Этим вопросам посвящена вторая глава данного пособия. Используемые при этом модели соответствуют более общему случаю- питанию ШД от инвертора напряжения. При использовании инвертора тока в приведенных выражениях параметры х и б весьма малы, в пределе х=б=0. Второй этап. Задание содержит одну или несколько программно-детерминирова'нных ситуаций, т. е. даны типовая траектория движения вида 9мех=/(0 и известны законы изменения Л^н' = /1 {9мех) и /н' = /2{9мех) сил СОПрОТИВЛеНИЯ и масс исполнительного органа в рабочем цикле. Это часто встречающаяся в гибких автоматизированных производствах ситуация. Обычно в этом случае предъявляются наиболее высокие требования к точности движения и его динамике. Именно здесь разо1.мкнутый програм1М1Ный электропривод поз- воляет получить самые высокие результаты, особенно в многокоординатных устройствах, где важна согласованность движений отдельных координат и учет их взаимного влияния через функции Мн(емех) и /н'(0мех). Решение этой задачи после оценки ее физической реализуемости более не требует анализа и уточнения динамики привода. Действительно, при известных параметрах нагрузки мол<но вычислить [3] необходимый для реализации движения 6 ex=f (О Момент /н (бмех) -Мн(9мех)=Мтреб^(9 ех). (1.2) Электромагнитный момент ШД при игнорировании влияния вихревых токов в элементах магнитопровода является функ- цией положения и тожов М(9, г'ь 12, , im), где 9 = фп9 ех- электрический угол. Требуя динамического равновесия во всех точках траектории Ш(е, ti t2, .... tm) =Мтреб(е), (1.3) мы должны найти токи как функции положения и (9), 12(9),..., t ,(9). Для этого нужно составить дополнительные уравнения, наложив на искомые токи связи из тепловых, коммутационных или иных соображений. Наиболее просто задача решается для двухфазных ШД. Неизвестные токи можно найти из решения алгебраических уравнений (1-4) где К - задаваемая жесткость угловой характеристики момента в точке равновесия с нагрузкой. В частности, для идеализированного ШД с синусоидальной характеристикой момента (9. ia, Jp) = Afm 4-ia-sinB+ipCOse) уравнения (1.4) дают f =-(e)-зшв-/С-созЭ; (1.5) fp=p(9) cosQ-K sin9, где р(0) = ф н i-Mmax * тах /фном Многофазные ШД путем линейного преобразования координат [1] сводятся к эквивалентной двухфазной машине. Обратное преобразование найденных токов ia и k дает нам реальные токи ti(e), 12(6),..., u(0), а исходное задание h-f{t) позволяет представить их функциями времени или црограммного угла задания у: 7(Y)= 2 4(0е (1.6) Таким образом, задача сводится к расчету и построению инвертора тока, который обеспечивает формирование вычисленных токов. Ширина токового коридора , внутри которого инвертор поддерживает расчетный ток фазы, и достоверность представления электромагнитного момента М(9, it, 12, , im) определяют динамическую ошибку. Она легко оценивается для построенного инвертора и корректируется, если .инвертор не работает в предельных режимах. Наиболее стро-¥ая постановка задачи построения программного движения оказывается и наиболее (простой по логике проектирования, но требует вместе с тем самых совершенных технических средств для своей реализации. Вопросам проектирования инверторов тока (Шювящена третья глава настоящего пособия. 1.2. Оценка физической реализуемости привода и рекомендации по выбору его структуры и параметров Синтез сложного нелинейного и многопараметрического объекта, каким является шаговый привод, невозможен без , использования его обобщенной динамической модели (2.2). > Для этого реальные величины задания и параметры пред- -варительно выбранного ШД необходимо выразить в относи- тельных единицах. Базисные величины и относительные еди- , ницы приведены соответственно в табл. 2.1 и 2.2. Безразмерные значения угла 9, угловой скорости м= . = dQ/dt и ускорения e=dQ/dx являются функциями обобщенных параметров п, х, б, Лн и управления у{х). Они связаны с требованиями задания соотношениями бтреб (т) =фп0мех (т) ; ©треб (т) = ©мех (т) ; бтреб (Т)= емех(Т) (1.7) Обобщенные параметры п, %, б, Лн могут варьироваться в широких пределах. Число электрических состояний на периоде изменения тока фазы средствами дробления электрического шага изменяется в пределах п=4-10. Параметры X и б (см. табл. 2.2) обратно пропорциональны коэффициенту форсировки и за счет выбора напряжения питания могут изменяться от нескольких единиц до нуля. Диапазон их значений, обычно используемых на практике: х=0-2; б=Ю-2. Относительный момент сопротивления нагрузки Цн=Мп /{iMrnax) за счет выбора двигателя и редуктора изменяется в пределах Цн=0-0,5. Задание на проектирование содержит в прямом виде ( ли из него могут быть выделены) предельные рабочие циклы движений, включающие в себя пуск, движение с установившейся скоростью, торможение, фиксацию положения. Соответствующие этим характерным ситуациям предельные величины и темпы их изменения 9треб(т), 0треб(т) и бтреб!(t) должны оказаться внутри границ реализуемости, которые зависят от параметров п, %, б, Лн и управления у{х)- Если это требова-ние выполняется, то параметры и управление уточняются по результатам анализа возникающих ошибок и .их сравнения с допустимыми по заданию. Дополнительно могут оцениваться развиваемая полезная мощность и мощность потерь в ШД. Обратный переход по известным формулам от безразмерных параметров к физическим величинам дает нам значения коэффициента форсировки и передаточного отношения редуктора г. Одновременно через вид управления (х) получают представление о структуре привода и целесообразности предварительно выбранного ШД. ШД с идеальным инвертором тока (х=б=0) при достаточно малом шаге п^16 в замкнутой структуре с нейтральным углом коммутации Yo=Jt/2=const; Y(9)=yo+9 является источником момента. Эта модель привода имеет предельные динамические возможности и дает первую оценку физической реализуемости. Уравнение движения d29/dT2+tH=it (1.8) при 1=й<и=1 позволяет немедленно получить уравнение границ динамических координат ет<и=1-Цн; С0тси=е™ -т; 9 < =0,5emo -t*. ((1-9) Можно варьировать только шаг а=2п/п и jiH=0-0,5. Наименьшее время позиционирования при гн=0 на заданном интервале пути 6=9раэг+9торм=29разг равно г„(п=2У9. (1.10) Если потребованные значения переменных (9, со, е)треб< < (9, со, г)шах, а время перемещения по любой траектории Ттреб>Тт(п, то привод рсализусм в замкнутой структуре или в разомкнутой структуре с программированием процессов разгона и торможения по законам, близким к (1.9). Далынейшая оценка возможностей 1разом1кнутой структуры ведется в ограниченной полосе низких и средних частот управления. В низкочастотной области 0/yfio/jt при старт-стопном управлении программа движения может быть произвольной. Для rt4 время движения на шаге Та не зависит от его величины и слабо зависит от нагрузки Та л:= const. , (1.11) Соответственно средняя скорость и общее- время движения на интервале пути зависят от величины шага и могут изме- пяться выбором числа п электрических состояний. Наивысшие показатели стартстопного движения следующие: ©ср .с=2/,г; T i =i(rt/2)9. (1.12) Алгоритм управления приводом может предусматривать работу с переменным числом состояний п, при п=4 получим (Осртах=0,5; Tmin = 29. Амплитуда мгновенной скорости при движении на шаге, равная Юшах=п/п, дает приблизител{.ную оценку скоростной ошибки стартстопа A(0=n/(2rt); (Асо/соср) =п/4. (1.13) Угловая ошибка при со = 0 равна статической (1.1), а в движении Д9 = я г. В средней полосе частот </y<fioj программа движения при наличии достаточного внешнего затухания в системе Лн = р-9 (или (iH=(iTp-sign9) также может быть произвольной. В условиях холостого хода верхняя граница снижается в У2 раз при внезапном торможении в переходных процессах пуска (короткие серии команд), а при внезапном реверсе -в 2 раза. Таким образом, в диапазоне скоростей (О со асс=2; У2; 1 (1.14) возможны произвольные скачки скорости задания, т. е. управление сериями команд с постоянной частотой /у< -Qo л импульсов в пачке. На каждом участке движение в среднем равномерное 9=сот, что предельно облегчает оценку реализуемости задания. В установившемся движении ошибки не превышают шага А9п,а =А :2я/,г (1.15) и могут устраняться выбором числа п. Главный недостаток произвольных режимов работы в полосе приемистости - это наибольшие значения угловых и скоростных ошибок в переходных режимах при скачках угла или скорости задания (см. рис. 2.3). При небольшом затухании и ограниченных скачках 9зад я созад возникающие ошибки численно равны между собой и примерно равны скачкам задания, т. е. Д9 = А(ОЙ:!бзад; А<0=АО ©зад. (1.16) Однако предельные ошибки, соответствующие устойчивости, неодинаковы: АвжоссИ; (1.17) Значения (1.17) дают пессимистическую оценку точности привода с произвольной программой дв1ижения в полосе скоростей (2/rt)<M<2. Если ошибки велики, а повышать передаточное отношение редуктора нельзя .по соображениям получения нужного диапазона рабочих скоростей, то можно рекомендовать простейшие алгоритмы программирования движений: уменьшать скачки частоты команд, припасовывать серии команд в таких фазовых состояниях, когда ошибки проходят через свои экстремальные значения. Например, при скачке скорости задания мзад<л:/2 в консервативной системе динамическая угловая ошибка у-9 = А6, угол 9 и мгновенная скорость со изменяются по законам: Д9 1Мзад-Зтт; м (Взаж(т-sinir); М Мзад(1-cost). (1-18) в моменты времени т^=2л:, k=l, 2,... 9А <йзад-Тл; А9д:;0; ахО. Если управление ведется сериями команд с числом импульсов в пачке N=i2nkfy)/Qo, 01-19) то в точках 9л остановки вала не сопровождаются колебаниями. В момент времени т=я м 2мзад. Повторение скачка задания скорости в этот .момент времени, т. е. после прохождения числа команд N=(nfy)/QQ, дает установившееся движение со скоростью м = 2мзад. Другие алгоритмы управления, фор.мирующие нужный вид движения, рассмотрены в гл. 2. При литании ШД от источника тока внутреннее демпфирование подавляется, и колебания в разомкнутой структуре сильно выражены. Это основной недостаток разомкнутого привода с инвертором тока. Привод целесообразен при наличии вязкого трения в нагрузке или в том случае, когда ШД снабжен демпфером. Внешнее затухание В приводится к безразмерному виду по формуле Р = QoB/ (РпМта.) = В (РпМ„а./.) -/2. ( 1.20) Уравнение движения замкнутого привода в этом более реальном случае (1.21) d29/dT2+pd9/dT+tH= 1 дает следующие граничные оценки при пуске из состояния покоя: s,p(T)=z(l jiJe-P- р (1.22) e,p(T) = )y .t-(l-e-3). Безразмерная электромеханическая постояниая времени привода равна 1/р. Конец переходного процесса характеризуют величины Туст = 3/р; (Оует=(1-JiH)/P; 9разг = 2(1-}1 )р2. (1.23) Соотношения (1.22) и (1.23) достовернее характеризуют предельные возможности привода с инвертором тока. Показатели на низких и средних частотах можно оценить по полиномиальным зависимостям из гл. 2, полагая х=0, блр. Угловые и скоростные ошибки при наличии затухания р уменьшаются, поэтому выражения (1.15), (1.16) и (1.17) сохраняются как пессимистические оценки. Подводя итог, отметим, что замкнутый привод или гибко программируемый разомкнутый привод с инвертором тока обладают наиболее широкими возможностями. Напротив, при слежении за случайным процессом этот привод с разомкнутой структурой имеет ограниченный диапазон работы и значительные ошибки в переходных режимах, которые не зависят от размера электрического шага. Эффективно влиять на свойства привода можно, таким образом, только через передаточное отношение i редуктора. Эти возможности невелики, так как тенденции по расширению диапазона рабочих скоростей и уменьшению ошибок противоположны. Возникающие затруднения означают, что нужно либо замыкать структуру привода, либо оптимизировать двигатель. ШД с инвертором напряжения благодаря внутреннему электромагнитному демпфированию имеет меньшую колебательность в полосе средних частот, а сам инвертор напряжения дешевле и проще инвертора тока. Поэтому, если Оценки (1.22) и (1.23) оставляют существенный запас по предельным значениям динамических переменных, а трудности состоят в уменьшении ошибок в диапазоне скоростей (2/ )<со<;2, то целесообразно рассмотреть привод с инвертором напряжения, т. е. с ограниченной форсировкой электромагнитных процессов. Замкнутый лривод с управлением у(9) =it/2-(-9, т. е. без оптимальной подстройки угла коммутации по закону Yo= +arctgxM, при ограниченных значениях параметра х ,и некоторой идеализации (id 0) приближенно описывается уравнением движения 6 dx 8 dx б Корни характеристического уравнения +1-4x5) (1.24) (1.25) показывают, что при хб0,25 процесс апериодический. Напомним, что .параметры х и б являются безразмерной формой постоянных времени Ta=K/Qo, Гм=11(Йоб), откуда имеем хб=Г„/Гм. (1.26) Таким образом, при исходных значениях параметров ХисхХ Хбисх>0,25, характеризующих собственно ШД без форсировки, всегда можно выбрать такой коэффициент форсировки (1.27) Аф=аУхисхбисх; а>2, что Иб= (Хис1бисх)/1ф^0,25. При >сб=0,25 корни одинаковы: pi=p2=-1/(2х) =-26. Общее решение уравнения (1.24) имеет вид ©=(Л-(-Вт)еР и позволяет получить следующие границы динамических переменных: e,p(T)=45(il-(iH)TC-2*V Игр (т) = соуст (1 -e-2 -26te-2*); вгр(т) =,соусх[т (11-1-е-2 )-у (1-е-2 )]; (1.28) уст = -pлзт 1,5- I уст = 10к. Выражения (1.28) прежде всего позволяют оценить эффективность замыкания привода в зависимости от значений параметров. В замкнутом приводе при x=i6=0,5, \Ih=0, (д)уст=2, а скорость приемистости разомкнутого привода с этими параметрами согласно (2.5) равна о)пр=1,41- Выигрыш ,мал. Очевидно замыкать .привод целесообразно при нб<0,25, т.е. при более значительном форсировании или ра- боте на значительную инерционную нагрузку. Напротив, разомкнутый привод при к8х0,5 и х/б 1 -1,6 обладает благоприятными характеристиками в перех!0дны1Х (см. гл. 2) и установившихся режимах работы. Наибольшая мощность, которую привод может развить в режиме приемистости, реализуется при нагрузке jiH 0,4 и равна * пр тах' О.Збм^пр/б. (1.29) где Рб - базисная мощность; Ипр=/(з<, Ъ, jah) согласно (2.5). Прих=-;б = 0,5 Рпржа.0,1Рб. В установившихся режимах работы теоретически наибольшая полезная мощность Р,па. = 0,26Рб. (1.30) При х/б= 1-1,5 она реализуется на относительной механической скорости м„ех=бм=0,6-0,7 при нагрузках iin= =0,3-0,4. Для оденки энергетической эффективности максимальную полезную мощность (1.30) можно сопоставить с максимальной мощностью джоулевых потерь в статике, которая при двуполярном питании составляет Р.о.шо.= Рь/к<. (1.31) При одвополярном питании потери удваиваются. .Предельная механическая характеристика М-н пред - l+xcoa (1.32) позволяет оценить запас по устойчивости и опрокидывающему моменту в реальном установившемся режиме с некоторыми значениями ш и Цн. Ошибки в установившихся режимах работы нигде не превышают размера шага (1.15), реально они существенно меньше. В области высоких частот /у>-fio (программный вывод на режим) ошибки исчезающе малы. Их предельные значения, оцененные при пессимистическом допущении х=0, М-н^О, равны Д9 .х=1/(/г^б); АсОж< =.2/(/г'б). (1.33) Диапазон регулирования практически равноме1рной скорости с пульсациями Дмж<м< (2л г) а.=сОж<и/сОт(п=я/1(2ях) (1-34) бказывается при этом функцией электрического шага и может составлять 10. Верхняя граница скорости Мтах=1/х соответствует границе возникновения автоколебаний. При и>1б ее можно считать предельной скоростью реального холостого хода. При б>х мхх=1/6. Можно сделать общий вывод о том, что прц средних уровнях форсировки X 16л; 0,5 замыкание привода нецелесообразно, а разомкнутый привод обладает благоприятными свойствами при ограниченной максимальной скорости холостого хода атах2. Если это удовлетворяет требованиям задания, то практически весь рабочий диапазон укладывается в область приемистости с произвольным законом поступления команд. Структура привода оказывается наиболее простой. ШД проектируются и рассчитываются как моментные двигатели, т. е. 1шах=1кз - мажсимальное значение тока соответствует току короткого замыкания при м = 0. Базисная мощность, в долях которой оценивается электромагнитная мощность привода, равна Рб = -~ U(,l6=Mmax0>Mex.-xx; (1.35) Wмех. XX = б/ (рпЧ^б) =ifio/l(pnS) . Прц питании от инвертора тока Uq-oo, базис мощно- сти (1.35) теряет смысл. Развиваемая мощность при М = = Л1т<.=const пропорциональна скорости и ограничена чисто механическими соображениями или потерями холостого хода. При конечных значениях параметров х, S мощность может варьироваться в широких пределах за счет как Рб= =йф, так и режима работы (0,05-0,25) Рб. . (1.36) Требования по расширению динамического диапазона и увеличению мощности приводят нас к наиболее часто встречающейся ситуации с весьма большими форсировками Аф>10, хб<;0,1. В этом случае в диапазоне низких и средних частот привод работает с постоянным моментом, а на высоких частотах- с постоянной мощностью. Особенность проектирования и оценок состоит в определении границы, где инвертор тока переходит в режим инвертора напряжения (см. гл. 3). Уравнения границ динамических переменных имеют вид: 8гр() уст 1 к 1-4x6 а>,Дх) = а), - [(1+ К1-4к6)еР - - (1-1/1-4xS) еР\; вгр [) = уст уст 1-/Г=Чхб X > 9уст -уст уст g j > уСт Сгл 1-/1-4x6 (1.37) Значения установившихся величин оказываются весьма большими. Так, при Цн=0, х=б для хб=0,05 имеем 1:урт=13,5, 0у„=4О. В этом диапазоне параметров необходимо либо замыкать привод, либо применять алгоритмы гибкого программирования. 1.3. Выбор главных размеров вращающихся ШД Главными размерами вращающегося двигателя являются диаметр и длина его ротора. При известных электромагнитных нагрузках (магнитная индукция в рабочем зазоре и плотность тока в обмотках), которые назначаются в зависимости от уровня технологии, используемых материалов и условий охлаждения, размеры Dp, Ip определяют [1] все необходимые параметры и технические показатели ШД: развиваемый максимальный момент М™ момент инерции ротора /р, мощность потерь в статике, величину Гя-Г„, габариты конструкции и т. д. Рассмотрим наиболее важные для нас соотношения: M, =pDp2/p; Jp=yDp4p, (1.38) где р= (2,5-3,5) 10 Дж/м^-жоэффициент испольвования; у:=600-700 кг/м^ - усредненная удельная инерционность тела ротора. Коэффициент использования р зависит'от типа конструкции двигателя и электромагнитных нагрузок. Для ШД с по- стоянными магнитами на роторе его можяо представить в виде =кВгН (1.39а) где Вг, Яс -остаточная индукция и коэрцитивная сила постоянного магнита; -численный коэффициент, характеризующий оообености иоиструиции и зависящий от числа п-ар полюсов, рабочего зазора и магнитных материалов. Для индукторных ШД z о, (1.396) где Zs, Zr - числа зубцов одного полюса статора и ротора; G\, Go - удельные магнитные проводимости зубцового деления ротора; В^ - магнитная индукция в зубцах. Подробные рекомендации по расчету коэффициента использования р и других параметров выбираемого ШД даны в [1]. Для примера на рис. 1.2 .приведена зависимость 6i/Go=i/i(Tz/6sr), т. е. в функции зубцовой геометрии, так как Тг -зубцовое деление, б^г -рабочий зазор между статором и ротором. Л 0,015 0,0го 0JI5 0,0 to о W ZD JO tf во Рис. 1.2. Зависимость удельных маг-интиых проводимостей от геометрии зубцовой зоны Число пар полюсов рп или зубцов Zr ротора слабо влияет на коэффициент использования при оптимальном размере .рабочего зазора. С увеличением полюоности необходимо уменьшать зазор, чтобы поддерживать т,/б.г = 20-30. Таким образом, при нужном уровне технологии лолюсность ШД следует выбирать из условий ограничения угловой ошибки с учетом возможностей создания инвертора, так как частота токов в фазах ШД пропорциональна р„ для заданной скорости движед1ия. Пределы изменения величин Р и y Для оптимально спроектированных ШД невелики и соответствуют (1.38). Опираясь на оценку доступных материалов, уровень технологии ироизводства, 1можно варьировать в известных пределах число пар полюсов, коэффициенты р, y и, как показано в [1], важное для энергетической эффективности привода отношение к1Ь-й(?ТкТя. Это позволяет составлять и решать уравнения проектирования для границ изменения динамических переменных или любого режима работы, охарактеризованного в относительных единицах через обобщенные параметры п, X, б, Цн и управление у(х). В общем случае для получения уравнений проектирования необходимо выписать данные технического задания, соотношения связи реальных механических координат исполнительного органа и безразмерных координат (1.7), формулы связи базисных величин (табл. 2.1) и относительных единиц -.(табл. 2.2), критериальную зависимость вида t, е, со, 0 или fy*-f{n, х, б, [Лн, y) и. наконец, выражения (1.38) для главных размеров ШД. Для первой предельной оценки замкнутого по положению привода с идеальным инвертором тока целесообразно связать главные размеры ШД и передаточные отношения редуктора с требованиями технического задания. Пусть нужно построить позиционный привод манипулятора и даны момент инерции нагрузки / , угол позиционирования 0мех и время движения /треб. Безразмерное уравнение связи времени и угла (1.10) нам известно - т=2У9. Перейдя через Qo к физическим заданным величинам, получим ,р,б=гуш'мех (/p+ZhVi) (1.40) Из уравнения dtTpe6/di=0 найдем оптимальное передаточное отношение 1 ,=у7777р. (1.41) Если любое принятое нами передаточное число редуктора подчинено условию (1.41), то согласно (1.38) получим Далее легко найти окончательные соотношения связи требований задания с главными размерами ШД и его параметра- 1 2 3 4 ... 6 информация от партнеров здесь |