
|
| |
 |
Главная » Мануалы 1 2 3 4 5 6 ми в функции свободно варьируемого передаточного отношения D -t л[ M =87 eW,(i-<Tpe6); Iv-=J /i. 1(1.42) Можно видеть, что диаметр ротора ШД, при котором реализуется потребованное движение, не зависит от момента инерции нагрузки, пропорционален времени позиционирования и слабо уменьшается с возрастанием угла поворота. Диаметр ротора можно изменять, веодя ред!уктор. Длина ротора, напротив, пропорциональна моменту инерции нагрузки, не зависит от передаточного отношения и очень быстро увеличивается с ростом угла поворота и особенно при уменьшении заданного времени позиционирования. Таким образом, в данной задаче редуктор позволяет изменять размеры двигателя, его вращающий момент и установленную мощност1>. При выборе редуктора отношение главных размеров Ip/Dp должно оставаться в разумных пределах, обычно lp/Dp= = 0,5 - 3,0. Учет трения в нагрузке или редукторе вносит замедление, которое можно оценить коэффициентом где ixH,=in,p.signe; Цтр=М'тр/(Ш„,ах); Время позиционирования натруженного механизма возрастет в раз, следовательно, is (1.42) нужно уменьшить расчетное время расч=1/треб/ац. (1.44) В рассмотренной идеализированной постановке кф-оо, и? ;6 0, а число тактов кохммутации >4 мало влияет на результат. Задача, ка~к отмечалось, сводится к выбору размеров ШД при варьировании единственного фактора - передаточного числа. В более общем случае, когда одновременно следует выбрать коэффициент форсировки и тип инвертора, задача решается аналогично, но время позиционирова-; ия и путь связаны более сложной зависимостью 0=fi(t, п, X, б, [Лн, у), которая определяется выбранным алгоритмом управления. Конкретные постановки могут быть различными, однако с большой общностью можно выделить наиболее представительную задачу: задана частота поступления управляющих команд или скорость движения в любых характерных режимах работы (стартстопное движение, приемистость, программированные циклы разгона или торможения, установившееся движение). Используя то обстоятельство, что относительные значения частот и скоростей связаны с истинными /у7/у=1/о; 1о/сомех==рг,170о (1.45) через собственную частоту колебаний привода, которая определяется через главные размеры ШД и приведенные к его валу параметры нагрузки, можно установить в общем виде связь главных размеров ШД с требованиями технического задания (/н', М/, 9мех, fy), качеством изготовления и уровнем технологии производства двигателя (р, у, рп) и кинематическими особенностями устройства (/): Dp=Vr,T ; Mi (1.46) где v , Гп - обобщенные переменные проектировЗ'НМЯ, имеющие соответственно размерность скорости и времени; fy* = =fin, X, б, цн, у) - безразмерная частота команд заданного режима работы привода. Величина Vn характеризует конструкцию двигателя, Гп- темп протекания электромеханических процессов с учетом замедлений, вносимых присоединенным механизмом. Действительно, при М/=0, /н' = 0 обнаруживаем, что 7n=l/Qo равна периоду собственных круговых колебаний ротора ШД. Если у fy I (1.47) то для потребованной частоты команд fy в рассматриваемом режиме работы привода fy* = f (я, х, 5, [Лн, у) двигатель вообще нельзя построить. По найденным главным размерам оце- яиваются лостояиные времени ШД н уровень форсировки, приводящий их к относительным значениям х, 6, назначенным в проектном режиме. Варьируя i, рп, п, [Ян и у{х), можно добиться соотношений, приемлемых как по размерам и типу ШД, так и с точки зрения требований к инвертору (fy, 1.4. Проектирование линейных шаговых двигателей Безразмерные уравнения привода с линейным ШД (ЛШД)! полностью совпадают с аналогичными уравнениями привода с его вращающимся прототипом. Продольный и поперечный краевые эффекты в многополюсных конструкциях, характерных для ЛШД индукторного типа, практически не проявляются. Есть, однако, и различия: 1. Привод безредукторный. 2. Базисная круговая частота собственных колебаний привода равна (1.48) где т и т„-массы подвижной части ЛШД и нагрузки; tz - зубцовое деление; F iax - максимальная тяговая сила. 3. Один из элементов ЛШД (якорь или индуктор) на рабочий ход 1хода длиннее другого. Поэтому, если движется длинный элемент, то его масса зависит от длины рабочего хода, как показано на рис. 1.3. С аналогичной ситуацией мы встречаемся в конструкциях двухкоординатных ХУ-ШД,. На рис. 1.4 показаны четыре конструктивные схемы таких двигателей. Для конструкций № 2 и 4 с разделенными зубчатыми зонами индуктора масса подвижного якоря также зависит от рабочего хода. 4. И в трубчатых (рис. 1.3) ив плоских конструкциях ЛШД тяговая сила и масса. подвижных частей одинаково изменяются с изменением главных размеров, так как эти величины пропорциональны площади активно взаимодействующих поверхностей. Таким образом, теоретическое ускорение ат=Р,пах/ш ЛШД зависит от выбранных электромагнитных нагрузок, может зависеть от рабочего хода, но не зависит от его главных размеров и мощности. Для ЛШД трубчатой конструкции по рис. 1.3 максимальная тяговая сила связана с максимальным моментом вра- 1и  Рис. 1.3. Схема конструкции ЛШД трубчатого типа 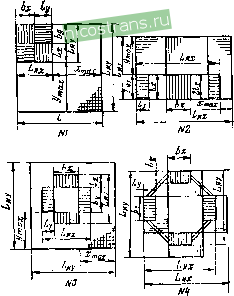 Рис. 1.4. Типовые схемы XY-ШЦ, щающегося лрототипа простым соотношением F = = {2/D )Mmax, откуда получаем Fmax=2DJ ; т„=р£)я2/ = р1>я2(/я+1хода), (1.49) Где р=8у - усредненная объемная плотность индуктора. Если индуктор полый, то р (1,5-2,5)-Ю^, кг/м^. Обозначив Х=1я/ЬхоАз; \Ип-Р„/Р, ах\ т*= {ти+тн)/тн (1.50) и связав потребованную частоту команд /у с безразмерной частотой /у*( , X, б, [Ян, у) согласно (1.45), получим уравнение связи главных размеров D, t с заданием для интересующего нас режима работы: 23 X где р 1+? in к \ h I 23Х.Оя /.хода D 2-2pD -f<7=0, 2л: к (fl\\ (1.51) <7 = р(1--Л)/.хода Физический смысл имеет лишь первое решение так как второй корень уравнения (1.51) при ?=0, т. е. в условиях холостого хода, дает не имеющий физического смыс-лaJpeзyлhтaт Dh = 0. Из (1.52) при = 0 найдем (1.52) 2л 23 (1.53) что частота собственных колебаний Qo=Dh~, а теоретическое ускорение ЛШД Стя . Следовательно, для увеличения быстродействия привода нужна стремиться к меньшим значениям диаметра якоря и большим Я, т. е. его длины. Из условия физической реализуемости ЛШД р^- определим минимальное значение Я=/я -хода. (1.54) С+1/С2+2С, где Полученная формула определяет нижнюю границу параметра ?1. Варьируя при выборе Дя, /я, Я^Л^ш, находим их соотношение 1я/0я, приемлемое из конструктивных соображений. Далее могут быть рассчитаны вое остальные параметры привода. Линейные двигатели с плоским рабочим зазором имеют постоянную высоту тела якоря, зави€ящую от электромагнитных нагрузок. При этом развиваемая тяговая сила Ртах и масса подвижного якоря Шя (индуктор чаше неподвижен) пропорциональны поверхности активного взаимодействия якоря и индуктора 5акт или полной конструктивной поверхности якоря 5я. Это позволяет определить силу и массу через площадь 5акт или 5я и удельные величины fmax- Рактк5акт= Ря5я, т„=:т*акт5акт = тя*5я, (1.55) где рзк,==(4-10)-10з Н/м2; Ря= (0,5-0,8) Ракт. Теоретически максимальное ускорение От .x=PaKi/ffl*a,(T 100 м/с1 С -учетом конструктивных деталей ЛШД оно меньше и обычно составляет ат=Ря/тя* 50-80 m/cI (1.56) Если исполнительному органу массой по заданию сообщается ускорение а, то необходимая для этого сила max (1.57) позволяет определить размеры якоря SH=6 / = Fmax/P . (1.58) Для планарных XY-VilJX с совмещенным индуктором Ракт снижается вдвое, а §я -примерно в 4 раза, так как уменьшается эффективная зубчатая поверхность при пересечении зубцов X и зубцов у, а общая площадь якоря возрастает в два раза (элементы л: и г/ якоря нагружают мас.сами друг друга). Таким образом, Ря в конструкциях № 1 и 3 на рис. 1.4 меньше, чем в конструкциях № 2 и 4. Но Ря в конструкциях № 2 н 4 зависит от рабочего хода, а в конструкциях № 1 и 3 Ря~const. Поэтому для малых перемещений целесообразны плапарпые двигатели с разделенными рабочими полями индуктора, а для больших перемещений - с совмещенным индуктором. Зная конструктивные признаки, .можно указать критическое значение рабочего хода Lkp, для которого обе конструкции равноценны и имеют одинаковое теоретическое ускорение. При 1хода</кр следует выбирать конструкции № 2 .и 4, а при /-хода-кр предпочтительнее конструкции № 1 н 3. Все рассмотренные ранее общие методы и оценки для вращающихся ШД и ЛШД трубчатой конструкции полностью сохраняют свою силу для модульного многокоординатного .привода с широким использованием планарных XY-UIJI или более сложных комбинаций. Специфика проектирования многокоординатных систем привода дополнительно требует учета взаимного нагружения координат собственными массами, как только что отмечалось, а также учета из.менбния тяговых сил и линейных ускорений под воздействием электромагнитных или внешних моментов вращения и при угловых колебаниях поступательно движущихся элемен-; тов привода. 2. ПЕРЕСТРОЕНИЕ ДИНАМИЧЕСКИХ МОДЕЛЕЙ ШАГОВОГО ЭЛЕКТРОПРИВОДА 2.1. Обобщенная динамическая модель Современный дискретный электропривод строится как с использованием инверторов тока, так н инверторов напряжения, В первом случае в рабочем диапазо.не частот мате- матическая мо.дель привода предельно проста и состоит нз одного уравнения движения [3]. Во втором случае электромагнитные переходные процессы существенно изменяют динамические свойства привода и должны учитываться при проектировании. Кроме того, при высоких частотах управления и ко1нечных форсировках напряжения питания любой инвертор тока переходит в режим инвертора напряжения. Поэтому в общем случае математическая модель электропривода состоит из т уравнений электрического равновесия но числу фаз ШД и уравнения движения [1,3], Вид внешних управляющих воздействий, .поступающих на т электрических входов, зависит от принятой системы коммутации, типа инвертора и может быть достаточно сложным, особен- но в случае применения нереверсивного инвертора напряжения с импульсным ф.орсированием токов фаз. На рис. 2.1 показаны временные диаграммы фазных напряжений ,и токов для нереверсивных инверторов напряжения с резисторной форсировкой при шунтировании фазы встречным диодом (рис. 2.1,а), встречным диодом с дополнительным источником питания или стабилитроно.м (рис. 2.1,6), при импульсном форсировании с применением двух источни- ----\
Рис. 2.1. Временные диаграммы фазных токов и напряжений для нереверсивных (а, б, в) и реверсивных (г, д) инверторов напряжения ков питания или одного источника с ключевым усилителем, выполняющим функции токовой отсечки, и для реверсивных инверторов напряжения с резистивной (рис. 2.1,г) и импульсной (рис. 2.1,(Э) форсировкой. Из рис. 2.il видно, что с точки зрения математического описания привода толБко случай 2.1,г эквивалентен питанию ШД от источника постоянного напряжения неограниченной мощности импульсами напряжения, амплитуда которых на этапах включения и выключения фазы остается постоянной. Причем знак напряжения из.меняет-ся с поступлением очередного импульса управления, а активное сопротивление фазы остается неизменным. .Это позволяет при питании ШД от реверсивного инвертора напряжения использовать преобразование координат с целью получения математической модели более удобной для исследования, чем уравнения в фазных координатах. Для нереверсивного инвертора (рис. 2.1,а) после закрывания ключа так спадает за время /сп ЗГф, замыкаясь через обратный диод. Это эквивалентно приложению к фазе нулевого напряжения (падением напряжения на диоде при протекании через него тока в прямом направлении можно пренебречь). Начиная с момента времени /о, обратный диод запирается, что приводит к скачкообразному изменению активного сопротивления фазы от номинального значения до бесконечности. Однако условие разрывности цепи R = oo, 1 = 0 не противоречит условию =0. Поэтому можно и на интервале времени /i/o считать сопротивление фазы неизменным, а напряжение, приложенное iK ней, равным нулю. Очевидно, что представление функции воздействия в виде импульсов лоложительного напряжения приводит к погрешностям только при низких частотах управления, когда в фазе протекает прерывистый ток. Эта погрешность состоит в замене обратного диода короткозамыкающим элементом и приводит на интервалах времени о к увеличению внутреннего демпфирования ШД. При высоких частотах управления погрешность отсутствует, что дает нам право и для неревер-оивного инвертора с резистивной фороировкой воспользоваться преобразованием координат. Для инвертора на рис. 2.1,6 также имеет место скачкообразное изменение активного сопротивления фазы, но в сочетании с более сложной формой напряжения на обмотке в процессе ее отключения. Преобразование координат здесь нецелесообразно, так как ведет к существенному усложнению функций воздействия, а анализ и синтез привода проводятся на основе решения системы уравнений в фазных координатах, записанной с учетом особенностей схемы инвертора. Для нереверсивных и реверсивных инверторов с импульсным форсированием (рис. 2.1,в и (3) широко используется метод замены реального инвертора эквивалентным инвертором с резистивной форсировкой. При этом входные воздействия приобретают вид рис. 2.1 а и г, а эквивалентная постоянная времени Хэ определяется исходя из условия получения минимальной средней квадратической ошибки в воспроизведении эквивалентным инвертором тока реального инвертора (рис. 2.2) во всех режимах его работы. Как показано в [4], при кфБ с достаточной степенью точности справедливо к,=к/{2кф), (2.1) где X - беараамерная постоянная времени фазы; кф - коэффициент импульсной форсировки. Таким образом, импульсная форсировка может считаться вдвое эффективнее простой резистивной форсировки. Рассмотренная замена инвертора напряжения эквивалентным открывает широкие возможности исследования большинства шаговых электроприводов с помощью уравнений в d, q коор- 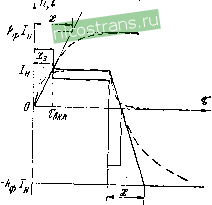 Рис, 2.2. К определению эквивалентной постоянной времени фазы при импульсной форсировке динатах, полученных в [11,3] с помощью преобразования координат: = cos(T-6); ; , , did . dO 1 + 17-Ит-в); (2.2) Система уравнений (2.2) справедлива для магнитоэлектрических ШД с активным ротором и для индукторных ШД с постоянными магнитами на статоре. При некоторых допущениях, которые оправданы прежде всего в задачах проектирования, эти уравнения справедливы для активных ШД с обмоткой возбуждения на неявнаполюсном роторе и для индукторных ШД, возбуждаемых постоянной составляющей тока в фазах или отдельной некоммутируемой обмоткой, охватывающей все фазные зоны. Суть допущений состоит в питании отдельной обмотки возбуждения от источника тока или в пренеб- режениИ переходными процессами в онтуре +0, т. е. в кон туре возбуждения для ШД с самовозбуждением. В качестве иашомииаиия в та1бл. 2.1 приведены базисные величины переменных систем уравнений (2.2), а в табл. 2.2 формулы связи относительных единиц с действительными переменными. Таблица 2. Базисные величины
Таблица 2.2 Относительные единицы
Напряжение (Уб равно амплитуде пространственного изображающего вектора U(у) = Ue, проекции которого на оси реальных п лреобразова-нных обмоток равны приложенным к ним напряжениям. Значение Ue и коэффициент .fe зависят от избранного способа коммутации. Так, при пар'ной коммутации обмоток двухфазного ШД U6z=-2U (k=f2), а при одиночной Коммутации 66= (т=1). Электрическое состояние ШД характеризуется углом у. Он задает простран- Ствен-ное положение изображающего вектора U{y), который в момент коммутации получает мгновенное угловое приращение, равное электрическому шагу ШД у=Уо+аЛ, где N- номер такта коммутации. Для парной коммутации двухфазного ШД уо = я/4, для одиночной уо=0. Выражения для напряжений Ua и Ug, приведенные в табл. 2.2, справедливы для симметричных циклов коммутации и усложняются для несимметричных [1]. Обобщенная динамическая модель шагового электропривода (2.2) справедлива для ШД с произвольным числом фаз. Она может использоваться также для исследования свойств привода с электрическим дроблением шага, если последнее осуществляется с помощью цифрофлзового преобразователя, управляющего через распределитель импульсов инвертором напряжения. П.ри предварительной калибровке электрических состояний ШД с целью получения движения с постоянным дробным шагом и при применении специальных способов ограничения длительности включенных состояний фаз с целью получения кругового годографа вектора результирующего напряжения [3] дробление сводится к уменьшению дискретности углового приращения вектора и (у) в коэффициент дробления раз, т. е. у=уо+аЛ/:др. Вид решения системы уравнений (2.2) полностью зависит от ступенчатой функции у(х), которая для разомкнутого привода является функцией безразмерного времени и формируется внешним программным устройством, а для замкнутого по положению привода (БДПТ) - функцией текущего угла поворота ротора обобщ.енных параметров х, б и Цн, которые характеризуют физические размеры, удельные нагрузки и энергетические показатели ШД. Величина х характеризует собой запас реактивной энер-пии в контуре, затрудняющей коммутационные процессы и не участвующей в процессе электромеханического преобразования энергии. Обычно х=0,5-2. При ограниченной частоте коммутации /у*<0,5 и при х<0,5 электромагнитные переходные процессы оказывают слабое влияние на поведение привода и могут не учитываться. Параметр б представляет собой относительную ЭДС вращения фазы при угловой скорости, численно равной круговой частоте собственных колебаний привода (табл. 2.2), и характеризует активную мощность, поступающую на вал ШД. Обычно 6 = 0,2-2. Отношение б/х характеризует каче- стю ШД как электромеханического пршбраз<ователя энергии. Относительный момент сопротивления нагрузки Цн чаще всего является реактивным и не превосходит 0,5. Заметим, что выражения в табл. 2.1 и 2.2 соответствуют резистивной форсировке. При использовании инвертора с импульсным форсированием эквивалентная постоянная времени должна быть определена в соответствии с (2.1). Математическая модель (2.2) хорошо приспособлена к задачам анализа шагового привода, но неудобная для синтеза. Применение методов теории планирования эксперимента [2] позволяет для большинства наиболее часто встречающихся задач перестроить традиционную модель в виде систе- мы нелинейных дифференциальных уравнений и получить ее в виде* алгебраических выражений, непосредственно связы- . вающих показатели динамики привода с обобщенными координатами X, б и (Лн, т. е. в форме, максимально удобной при проектировании привода. Метод получения таких зависимостей подробно изложен в [2], поэтому далее приводятся лишь итоговые уравнения проектирования с краткими комментариями. 2.2. Определение частоты приемистости Частотой приемистости называется наибольшая частота управления, при внезапном набросе которой ротор двигателя еще входит в синхронизм. В диапазоне частот, не превышающих частоты приемистости, шаговый электропривод работает без потери информации при любом законе изменения частоты управления. Причем динамическая ошибка ограничена одной пространственной полуволной поля у-OJt. Частота приемистости fnp при =4, т. е. при шаге а=я/2, связана с безразмерной скоростью приемистости соотношением сйпр=(я/2)/*пр=(я/2)йо-7пр (2.3) и является функцией обобщенных параметров привода o)np=:f(x, б, Цн). (2.4) Зависимость (2.4) может быть найдена с помощью теории планирования эксперимента путем постановки на цифровой или аналоговой модели привода, составленной в соответствии с (2.2), следующих опытов. Для каждого планового сочетания параметров х, б, назначается определенная час- тота управления, т. е. темп арастания во времени ступенчатой функции у{х). Если при этом двигатель входит в синхронизм (рис. 2.3,а), то опыт повторяется при увеличенной частоте команд. Постепенно повышая частоту управления, находят такое ее значение, превышение которого ведет к выпаданию двигателя из синхронизма (рис. 2.3,6). Это и есть искомая частота приемистости для заданного сочетания параметров к, б, [Лн. Меняют в соответствии с планом сочетание факторов X, б, и повторяют процедуру поиска частоты приемистости. sfl Рис. 2.3. Осциллограммы скорости в опытах по определению частоты приемистости Итоговое выражение для безразмерной скорости приемистости получено в [2] с помощью полного факторного эксперимента ПФЭ 2 шг,р= 1,89-0,34х-0,716-1,.82ц„+0,18хб-Ь0,57бц , (2.5) оно справедливо в следующих диапазонах изменения обобщенных параметров привода: х=0,15-2,0; 6=0,15-2,0; ц„=0,05-0,45. Как показали специальные исследования [10], формулой (2.5) можно пользоваться и при проектировании привода с электрическим дроблением шага, так как скорость приемистости практически не зависит от коэффициента дробления шага. Это объясняется тем, что дробление шага уменьшает лишь высшие гармонические составляющие фазных токов, оставляя неизменной первую гармонику, которая участвует в электромеханическом преобразовании энергии. Для приводов с дроблением шага частота приемистости увеличивается пропорционально коэффициенту дробления /пр= (2/л)0(уАдр(й„р. (2.6) Приводы роботов и манипуляторов часто работают с пере-1менным моментом инерции. .Как следует из табл. 2.1, при этом меняются собственная частота колебаний и вследствие изменения базиса времени - величины х и 6. Оценивая эти изменения, можно рассчитать значения сопр по краям диапазона изменения момента инерции, а воспользовавшись соотношением (2.5) и подставляя сопр в (2.6), найти диапазон изменения частоты приемистости. Очевидно, что вследствие уменьшения Qo с ростом момента инерции частота приемистости будет уменьшаться. Подтверждением этому Я'вляется полином о)пр=-0,06-f 0,28х-0,07!iH-f -fl,9/-/2-0,62xr/2-0,68o6-f0,646-0,2хц + . -Ь0,2бц -1,67б/-/2-1,26ц„/->/Ч1.5х&г'/2, (2.7) полученный из условия, что величины х и 6 определены для минимального момента инерции, принятого за базовый /т,-п= = /б, а возможные изменения момента инерции учтены от-делыным фактором \, численно равным относительному моменту инерции \=1 Ih. Выражение (2.7) справедливо в следующем диапазоне изменения параметров: х=0,05-0,5; 6=0,05-0,5; [.1 =:0,05-0,5; /=(1-3. Приведенные формулы позволяют оценить на этапе проектирования привода область рабочих скоростей (частот), в которой не требуется программИрование переходных процессов и на закон изменения частоты управления не накладываются ограничения. 2.3. Оценка качества движения разомкнутого электропривода Пуск ШД из состояния покоя сопровождается колебаниями мгновенной скорости, которые особенно значительны на частоте приемистости (рис. 2.3). Показателем качества любого переходного процесса является перерегулирование. В [2] дана оценка перерегулирования по скорости, полученная из условия пуска привода на частоту приемистости: о%=.{ - Р ) 100%=(0,912-1,214б).100о/в. (2.8) Зависимость (2.8) верна для приводов с небольшими значениями X и .6, где имеет место перерегулирование по скорости (4=0,1-0,9; 6=0,05-0,65; ti =0,05-0,45). Из (2.8) видно, что основиьш фактором, влияющим ,на перерегулирование, является коэфф'Ициент внутреннего электромагнитного демпфирования И есЛ'И он мал, то о достигает 100%. При проектировании привода коэффициент б выбирается исходя из тр.ебований к качеству переходного процесса. Если путем выбора типа двигателя и напряжения питания инвертора но удается получить требуемых показателей качества, применяют внешнее демпфирование колебапий с помощью демпферов, создающих вязкое трение а валу, или специальных эле(Ктронных схем, работающих в функции производной скорости (обратная связь по ускорению). Наиболее широко внешнее электронное демпфирование применяется для дву.х-й многокоординатных ШД, работающих с аэростатическими опорами, ввиду практически полного отсутствия сухого и вязкого трения в приводе. Для многих производственных механизмов, в том числе po6iOTOB и манипуляторов, ограничивается не только допустимое перерегулирование по скорости, но и амплитуда колебаний мгновенной скорости в установившемся режиме работы. Поэтому вторым важнейШ'ИМ показателем качества движения разомкнутого шагового пр.нвода является величина АСйу= 0,3 ((0 .ах- ,; ), (2.9) представляющая собой амплитуду колебаний мгновенной скорости при неизменной частоте управле.ния в установившемся режиме. Очевидно, что Асоу зависит не только от обобщенных параметров привода, но и от средней установившейся скорости (Оу (для х=0,05-0,25; 6 = 0,05-0,25; [j,h=0,05- -0,20; /=4-3; шу=0,5-1): Д1шу == 0,065-0,125х-0,1256-0,325/-- ~0,02а)у- 2+0,435/-1(Оу- 2. (2.10) Полином (2.10) можно использовать для анализа качества движения действующего привода и синтеза привода, удов летворяющего ааданным требованиям. 2.4. Расчет алгоритма работы блоков программного разгона и торможения ШД Расши,рить частотный диапазон работы шагового электропривода за границы приемистости можно путем программного разгона и торможения. При этом частота управляющих импульсов может меняться скачкообразно в определенные моменты времени, либо плавно, например, по линейному или 38 экспоненциальному законам. Устройства, реализующие требуемый закон изменения частоты, называются устройствами программного разгона и торможения. Их функции в общем случае может выполнять микропроцессор. При этом в память записывается зависимость времени задержки между двумя соседними импульсами управления (т. е. мгновенный период импульсов управляющей частоты) от текущего времени или номера шага. Эта зависимость задается обычно табличным способом на основании предварительного расчета методами теории планирования эксперимента. На рис. 2.4 показан один из способов р1асщирения частотного диапазона привода за счет повторного скачкообразного наброса частоты в момент времени, когда мгновенная скорость движения ротора близка к максимальной [3]. Если первоначальный наброс частоты был равен частоте приемистости, то после повторного наброса частоты двигатель без потери информации выходит на скорость, значительно превышающую скорость приемистости. Такие набросы частоты, как следует из рис. 2.5, могут повторяться многократно. При этом максимальная скорость привода будет в несколько раз выше скорости приемистости. При однократном повторном набросе частоты (рис. 2.4), есл.и Acoi тах=(Опр, максимальный повторный наброс частоты Ашгтм и номер шага Nopt, на котором он должен быть произведен, могут быть определены из соотношений (для х= =0,1-0,9; 6=0,05-0,65; [! =0,05-0,45) [2]: Д:(й2 ,< =3,02-0,85х~4,43б-2,71lrf+ +1,41иб-0,45)!л„+4,15б!Лн; Л/ р, = 8,13+0,37х+2,11б-4,6611н- - 4,43иб-3,39х111 -0,52б!11 +5,2]хб!а„. (2.11) В этом случае, если пуск осуществляется также в два этапа, но удвоением частоты команд .на некотором Ш|аге Nopt, наибольшая воз.можная скорость достигается при выполне--НИИ условий (для х=0,1-0,5; 6 = 0,05-0,35; iuh=0,05- -0,25) [2]: Д|Ш, = Д(02=Ао)= 1,94-0,31 X-2,416-1,211 u + -f 2,2х)б-2,4xa +0,676u, : Noj,t=5,56+8,96х-7,бОб+7,92ц„- 16,67x6 - - 70,83хц -33,33б[11н+166,7хб1 . (2.12) Так, для сочетания параметров привода, указанных на рис. 2.4, применение формул (2.11) и (2.12) дает <ti>2max= =L574; Л^ ==6; А(о=1Л62; N =%, т. е. первый способ управлен-пя обеспечивает несколько большую ма-ксимальную скорость. ЬлО'К программного разгона при таком сочетании параметров должен обеспечить увеличение частоты на шестом шаге с момента начала движения.  г max JU=0.85;se-0,3; 6-U,Z
Рис. 2.4. Пуск ШД с повторным набросом частоты Рис. 2.5. Пуск ШД с многократными наброса-ми Частоты При большом числе ступеней наброса частоты (рис. 2.5) траектория разгона прибл.ижается к гладкой кривой экспоненциального характера, которая близка ik предельной теоретической Кривой разгона, полученной в результате решения уравнения движения с зависимостью момента двигателя от скорости Цэпред(ы), соответствующсй предельному но усло-вияхм устойчивости режиму работы шагового электропривода [3]. Зависимость Цэпред(о)) представляет собой граничную механическую характеристику, выше которой при данном сочетании параметров разом-кнутый привод выпадает из синхронизма. При числе тактов Коммутации п=4 в двигательном реж'име .работы имеем !эпред( )=-- (213) Предельная кривая разгона, полученная нз решения нелинейного днфференц'иального уравнения вида ~ = [э пред ( ) - JH, (2.14) используется для определения предельного закона изменения частоты управления от времени /у пред(т) прн нроектирова' ни устройств прО'Грам.много разгона. Для режима торможения ШД противовключением также существует предельная зависимость момента от окорост1И (2.15) (2.16) V-ъ пред т У ) - 1 +х2(о2 > подставляя которую в уравнение движения flfo) , . - пред т Щ - 1н. получают предельную 1крив,ую торможения ШД. Эта кривая является основой для расчета алгоритма работы бло'ка программного торможения. 2.5. Оценка максимальной скорости ШД в режиме бесконтактного двигателя постоянного тока При фиксированном значении угла уо. определяющего положение датчика на валу (угол .коммутации), установ'ив-шаяся скорость зависит от нагруЗВи И обобщенных параметров приво.да )y=/i(K, б, Хн). Эта зависимость представляет собой механическую характеристику ШД в режиме БДПТ. Подобно механической характеристике обычного коллекторного двигателя .постоянного тока скорость БДПТ является функцией нагрузки и приложенного на.пряжсния, уровень которого задает значения х и б. Она в .отличие от коллекторной машины постоянного тока существенно зависит от постоянной времени х, так как из-за ограниченного числа фаз .нельзя пренебречь электромагнитными переходными процессами при коммутации обмоток. При ограниченных значениях х выбирается обычно нейтральное положение датчика, т. е. уо=л/2. В это-м случае математическая модель ШД (2.2) дополняется следующим уравнением цепи обратной связи по положению: Y=V2-fa. ri(e/a). (2.17) Планируемый эксперимент в диапазоне изменения факторов х=0,15-0,45; 6=0,15-0,45; Цн = 0,05-0,25 позволяет получить Полиномиальное представление зависимости щ от обобщенных параметров [2] . (йу=9,0-6,4х-23,06-10,8ь1 -1- -f 12,5хб+16,16u -f 16,762. (2.18) Соотношение (2.18) используется при проектировании замкнутого привода с инверто,ром напряжения для оценки мак- 1 2 3 4 5 6 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||