
|
| |
 |
Главная » Мануалы 1 2 3 4 5 6 оимального частотного (скоростного) диапазона работы приводу. В том случае, если постоянная времени % мала п ею можно пренебречь, уравнение механической характеристики ШД в режиме БДПТ существенно упрощается о)у=(1-ц„)/б (2.19) п совпадает с аналогичным уравнением обычного коллекторного двигателя постоян.ного тока. При больш.их к система управления БДПТ должна обеспечивать опережающую коммутацию фаз в соответствии с выражением Yo= ± (л/2) -barctgxcu, (2.20) где знак минус соответствует режиму торможения ШД против овключением. При этом механическая характеристика БДПТ в двигательном режиме совпадает с (2.13), а в тормозном- с (2.15). Эти формулы используются при проектировании замкнутых приводов с ШД гИ в случае применения инвертора тока, так как при высоких скоростях движения инвертор тока автоматически переходит в режим инвертора напряжения. 2.6. Алгоритмы стартстопного управления Одним из важнейших режимов работы ШД является режим отработки единичных шагов. Как показа1но в [3], теоретически М1Инимальное время отработки шага составляет Татт = л/2. Апериодическая отработка шага возможна при значительном затухании в системе. Однако затухание замедляет движение и существенно увеличивает время отработки шага по сравнению с минимальным теоретическим. Если коэффициент внутреннего демпфирования мал, а внешнее демпф1иров.ание отсутствует, то время успокоения колебаний может в десятки раз превышать время движения на шаге. Именно для таких систем перспективным является старт-стопное управление. Оно позволяет получить привод, воспроизводящий движения мальтийских .и грейферных механизмов, когда каждый шаг отрабатывается с максимальным быстродействием при отсутствии перерегулирования по положению. Напомним основную идею стартстопного управления (рис. 2.6). Допустим, к в^алу двигателя приложен момент Нагрузки типа сухого трения, а исходное положение вала соответствует середине зоны нечувствительности (точка Oi на статической характеристике /). Входной импульс управления за-пускает блок стартстопного управления, вырабатывающий три импульса, два из которых (первый и последний) поступают на вход Вперед реверсивного распределителя импульсов, а третий (про-меж'уточный)-на вход Назад . Первым импульсом обмотки управления ШД переключаются в направлении Вперед . Если х и б малы, то это переключение соответствует мгновенному сдвигу статической характеристики в положение 2, отличающееся от положения / на шаг. Под действием возникшего момента ротор ускоряется и на участке разгона 9р накапливает кинетическую энергию Wp. В момент Ti второй импульс с блока стартстопного управления поступает на вход Назад распределителя и исходное состояние / восстанавливается. Под действием тормозного момента ШД уменьшает свою скорость. Запасенная кинетическая энергия Wp к моменту времени Тг полностью расходуется на преодоление суммарного тормозного момента Wp=Wt, т. е. в момент времени Т2 кинетическая энергия ротора и его скорость равны нулю. Подавая в этот момент времени импульс на вход Вперед распределителя, фиксируют достигнутое механическое состояние. При питании от источника тока {%=\Ь=0) углы разгона и торможения являются функциями только числа тактов коммутации и нагрузки ц„: 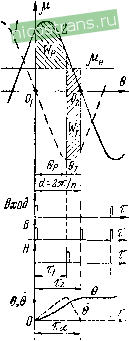 Рис. 2.6. Принцип стартстопного управления 0р = + arcsin ; в, = - sin - я п --arcsin - п п п - sm - л п (2.21) Интегрируя уравнение движения привода g+(x =ein(Y-e) (2.22) в пределах от 9 = 0 до 0 = 0р .и от 0=0р до 0=©р+ет=а, можно иайти Ti и общее время движения на шаге Та, которое в даином случае совпадает с Тг. Значения Ti я Тг илп 0р 1И От служат для настройки блока стартстопного управления при проектировании привода. Пессимистическую оценку времени отработки шага Та можно получить, усреднив момент двигателя на шаговом интервале (при этом дифференциальное уравнение (2.22) становится линейным и имеет аналитическое решение): z -, (2.23) в режиме, близком к холостому ходу, Га .2л/1/я, (2.24) а максимальная частота управляющих импульсов равна fym =fy*n...-Qo=2nfo/Ta=yrtfo. (2.25) Соотношение (2.25) означает, что, например, для двигателя с четырехтактной коммутацией fymax=2fo и в диапазоне частот от нуля до двойной частоты собственных (колебаний привод может рассматриваться ка.к интегрирующее звено с запаздыванием, равным времени движения на шаге. Из приведенных выше пояснений следует, что при х= =,6 = 0 (питание ШД от инвертора тока) задача поиска алгоритма стартстопного управления легко решается аналитически. Положение существенно усложняется для реального привода, получающего питание от инвертора напряжения. Здесь возможны три случая: 1. Сочетание параметров таково, что естественный процесс отработки шага апериодический и сТартстопное управление лишено смысла. 2. Сочетание параметров таково, что простейший алгоритм стартстопного управления с двумя переключениями управления не в состоянии устранить колебания исполнительного вала (рис. 2.7). Этот случай может иметь место при малой нагрузке ц,н и большой постоянной времени х, обычно при х>2. Так как проектировщик всегда имеет возможность выбрать требуемый уровень напряжения питашя инвертора и снизить X, то этот случай для инженерной практики несуществен и в дальнейшем не рассматривается. 3. Сочетание параметров таково, что стартстопное управление возможно (рис. 2.8) и осуществляется так же, как и в случае питания ШД от источника тока, за исключением одного момента. Импульс, фиксирующий положение ротора, подается из-за электромагнитной .инерционности ШД до полной остановки ротора, т. е. Т2<Та. Это упреждение связано с конечной скоростью изменения поля в рабочем зазоре. Очевидно, что случай 3 автоматически переходит в случай 1 при уменьшении х. При этом Тг стремится к Та. 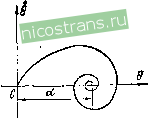  Рис. 2.7. -Фазовый портрет движения иа шаге при стартстопиом управлении и больших Рис. 2.8. Стартстопное управление при хфО В [2] дана оценка области параметров, в которой стартстопное управление целесообразно И реализуемо на практике. Эта область соответствует случаю 3 (колебательный процесс отработки шага) и может быть задана при х^1, 60,6 уравнением (Лн0,63-0,05х-0,496-0,004>об. (2.26) Для проектирования блоков стартстопного управления достаточно знать зависимости времени разгона Ti=Tp, времени восстановления (Поля Т2=Тр-Ьтт. полного времени отработки шага Та и электрических углов переключения 0i и 02, -оответствующих ti и Тг, от обобщенных параметров приво- да. Каждый из опытов, проведенных т модели (2.2), состоял в поиске оптимального сочетания параметров х\, Тг, при которых, стартуя из центра зоны нечувствительности (точка t Oi на рис. 2.6), мы приходим в центр зоны нечувствительно- сти около новой устойчивой точки О2 (рис. 2.6). На основе ; этих ОПЫТ01В получены следующие уравнения проектирования [2] (для х=0,25-1,0; 6 = 0-0,6; =0,15-0,326): ti=.l,13+0,09x+0,346+l,93n -3,19x6+ +2,69хц +9,05б|х„+9,16> б,хн; *Г2=2,41-0,18х-0,6Эб+0,17х„-2,90x6+ +3,86х|Хн+8,60б|х„+7,67ибХн; т„=2,77+1,33х+0,77б+0,98х„; в,=34,0-22,4х+73,8б+69,0Хн-146,6x6+ +42,8х|х„-55, Ii6x +493x6x ; 82=93,2-35,9х+6,7б-23,8х„-81,2x6+ +95,4х|1 +2,86х„+273,8х6х„. (2.27) На основе (2.27), зная параметры привода, можно рассчитать линии задержки импульсов, на базе которых чаще все-то строятся блоки стартстопного управле И1Я. При случайном изменении нагрузки или других параметров новый цикл движения может начинаться не из центра зоны нечувствительности, -а из любой точки в пределах ±Л9нач. При этом движение устойчиво, если оно не сопровождается колебаниями скорости, и фазовые траектории, начинающиеся на границах зоны нечувствительности предыдущего шага, оканчиваются в пределах зоны нечувствительности последующего шага. Под коэффициентом устойчивости стартстопного движения понимают отношение конечных и начальных угловых отклонений ротор^а от центра зоны нечувствительности Йус.= .Авко / !Ав ач. (2.28) Если JfeycT<l, то процесс отработки стартстопных перемещений сходится к центру зоны нечувствительности. Как показано в [2], в диапазоне изменения параметров, указанных для (2.27), процесс всегда устойчив и Ау<.т=0,63-0,66. (2.29) Это соотношение позволяет оценить число шагов Л^, за которое отклонение ЛЭнач уменьшится до любого заданного уровня АОзад. Из уравнения А9зад= (уст)-Авнач получим . (2.30) 2.7. Расчет линии переключения для позиционного привода с ШД в режиме (БДПТ При проектировании привода роботов и манипуляторов часто возникает задача лозиционирования исполнительного механизма с высокой точностью при м-акоимальном быстродействии. Если нагрузка определена и меняется в процессе позиционирования !незначительн0, то оптимальным по быстродействию является следующий алгоритм управления ШД. С поступл1ением на вход привода (Кода требуемого перемещения устанавливается угол коммутации уо=л/2 и ШД разгоняется с максимальным ускорением в режиме БДПТ. В память блока управления, в состав которого, как правило, входит микр1опроцессор, записывается так называемая линия .переключения 9.=Я(й). (2.31) Она функционально связывает между собой тормозной путь 9т при переводе БДПТ в режим торможения противовключе-нием и начальную скорость, с которой начинается торможение. В микропроцессор непрерывно поступают сигнал рассогласования по положению А9 = 9зад-9 и сигнал скорости (0. В момент времени, когда рассогласование по положению окажется равным тормозному пути, заданному соотношением (2.31), микропроцессор переводит БДТП в режим торможения, которое заканчивается в заданной точке пути без перерегулирования и дотягивания. На рис. 2.9 показано семейство фазовых траекторий такого привода с совмещенными координатами конца движения. В точке / подается задание на перемещение и рассогласование А9 максимально. В точке 2, находящейся на линии переключения, начинается торможение привода. Если привод работает в режиме, близком к холостому ходу, а питание ШД производится от инвертора тока, то из Уравнения движения при торможении d(i)/dr=-ii3 (2.32) легко находятся уравнение линии нереключения (2.33) При питании от инвертора напряжения (2.31) целесообразно представить в виде 9т=(и, 6, х„, (йотн)-0)2, (2.34) где i - корректирующий коэффициент, зависящий от обобщенных параметров привода и относительной скорости (Оотн=(й/(йу. Причем у вычисляется при известных к, б, Хи по уравнению (2.18). 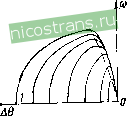 Рис. 2.9. Фазовые траектории оптимального по быстродействию позиционного электропривода с БДПТ Методом планирования эксперимента на модели привода, построенной в соответствии с (2.2), получено следующее выражение для (Корректирующего .ноэффициента (при х=0,15- -0,46; 6=0,15-0,45; х„ = 0,05-0,25; хоот = 0,3-0,8) [2]: , =0,374+2,07x+2,56-f0,72(0oT -4,54i5o)oTH. (2.35) Его можно использовать для расчета линии переключения оптимального ио быстродействию позиционного электропривода. 2.8. Устойчивость планарного электропривода Математическое описание многокоординатного электропривода имеет ряд особенностей. Эти особенности связаны со значительным увеличением количества степеней свободы электромеханического модуля. Так, в общем случае ллоские двухкоординатные шаговые электродвигатели (рис. 2.10) имеют шесть степеней свободы. При этом перемещения по осям X и у (Qx Qy) являются полезными, совершаются под действием развиваемых двигателем рабочих усилий и ограничиваются размерами рабочих ходов по этим координатам. Остальные возможные движения - вдоль вертикальной оси z{di), поворот вокруг осей х, у, z (ф^, (р^, ф^) - можно рассматривать как нежелательные. Они возникают вследствие изменения вертикальной нагрузки модуля, подъемной силы аэростатической опоры, асимметрии подъемных сил опоры слева и оправа от оси, проходящей через центр масс модуля, действия на модуль внешних случайных разворачивающих моментов. 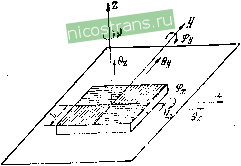 Рис. 2.10. Двухкоординатный модуль планарного электропривода Перемещения вдоль оои z, а также поворотные перемещения вокруг осей л; и г/ происходят в пределах, ограниченных рабочим зазором. Так как в реальных машинах аэростатическая опора имеет высокую жесткость и рабочий зазор мало меняется даже при значительных изменениях вертикальной нагрузки, то этими перемещениями с высокой степенью точности можно пренебречь. По-иному обстоит дело с перемещением вокруг вертикальной оси z. Даже при отсутствии внешних случайных возмущений поворот v может иметь место за счет асимметрии усилий, развиваемых двигателем на различных участках его активной повер.хности. Кроме того, в случае установки на двухкоординатный модуль поворотного или линейно-поворотного двигателя с целью увеличения количества степеней подвижности до 3 или 4, электромагнитное усилие, развиваем,ое двигателем - наездником в продессе отработки угловой координаты ф, воспри.нимается иланарным электроприводом как возмущающее воздействие И приводит к повороту модуля вокруг оси Z. Этот поворот вызывает изменение электромагнитных усилий ХУ-ШД ¥ и Fy ;вследст1В1ие нарушения параллельности зубцовых зон якоря и .индуктора (неподвижного основания). Так, для оим.мет-ричной конструкции ШД !(рис. 2.10) суммарное усилие, развиваемое двумя зубцовыми зонами в направлении оси х, равно {ill] Fx=f{x,y)=Jr-smQ.-=-K-Fr -s\n-~ х. (2.36) где ky, - коэффициент уменьшения рабочего усилия при но-воротных перемещениях v. Этот коэффициент учитывает сме-щен'ие центра зубцовой зоны якоря относительно индуктора и скос зубцов якоря как в направлении оси х, так и у. На рис. 2.11 показана кривая, иллюстрирующая зависимость коэффициента К от величины поворотного перемещения. Из нее следует, что поворотное перемещение v должно обязательно ограничиваться, так как в лротивном случае рабочее усилие не только уменьшается до нуля, но и (изменяет знак, что вызывает обой в работе ШД и потерю информации.
Рис. 2.M. Уменьшение рабочего усилия ХУ-ШД прн поворотных перемещениях При развороте якоря относительно индуктора на каждую зубцовую зону якоря действует восстанавливающая сила, плечо которой определяется расстоэн.ием от центра зубцовой зоны до центра масс модуля k (рис. 2.10). Эти силы и создают результирующий возвращающий момент, стремящийся вернуть модуль в положение равновесия v=0. Максимальное значение синхронизирующего момента имеет место при е^=ех=0, т. е. в положении устойчивого равновесия по координатам х и у. Жесткость характеристики восстанавливающего момента .пропорциональна k. Допустимая величи- на внешнего разворачивающего момента, не приводящего к потери устойчивости в статике, может быть оценена соотношением [11] Mv on.</of , (2.37) а допустимый угол отклонения от равновесного состояния соотношением v on<0,25T o. (2.38) Оценка устойчивости в динамике требует решения полной системы уравнений двухкоординатного электропри1вода, составленной с учетом координаты v: didx dx diox + V = cos(f-e) cos v; .dQr + (b+Kia,) = sin i-tx-Qj,)- cosv; (2.39) dy+-~ +Щу = cos (Tf, - By) cosv; - + t+f) S = Sin (Ty-Oy) cos v; -+Py-+/cp = (l-ayV)i; ; a-- Pv dv dx где Рж, ty, Pv-коэффициенты вязкого трения по соответствующим координатам; fcx, fey - усилия сухого трения; a , Uy - коэфф.ициенты, характеризующие уменьшение полезных усилий при разворотах якоря на угол v. Для симметричных модулей можно принять а:.=а^=0,25; а= (Йолнн/йо пов)- отношение квадратов частот собственных колебаний при линейных и поворотных перемещениях; [и(х)-внешний разворачивающий момент. Заметим, что при отсутствии возмущающего момента li{x) система (2.39) распадается на две независимые системы уравнений по координатам х и у, аналогичные (2.2). При этом все полученные ранее уравнения проектирования справедливы. Анализ системы (2.39) на ЭВМ с применением методов планирования эксперимента позволил получить уравнение для расчета критического значения разворачивающего мо~ мента, т. е. момента, превышение которого ведет к потери устойчивости (для а=0-2; Pv=0-1; Px=:Pv=P v==0-1; (xp=0,65+0,06a-0,04pv-0,01ip:e -0,101- -0,01(ар,-Pvp. +cep. +ipv), (2.40) где g=Y . Для планарного электроприаода из-за малости воздушного зазора X и б не превышают 0,2. Их изменеиие практически не сказывается на цкр. В том случае, если реальные повороФНЫе нагрузки робота или манипулятора не превышают допустимые по условию устойчивости, но велики, можно применить электронную систему стабилизании углового положения v = 0 за счет кратковременных встречных переключений отдельных элементарных зон якоря, симметрично расположенных относительно центра масс. Очевидно, что^ применение такой системы возможно лишь при наличии датчика угла рассогласования осей якоря и индуктора. 2.9. Выбор несущей частоты ШИМ для приводов с дроблением шага При применении в качестве блоков дробления шага цифрофазовых преобразователей [3] разработчик сталкивается с задачей выбора несущей частоты двух импульсных последовательностей, поступающих па вход распределителя импульсов. Очевидно., что эта частота должна быть такой, чтобы в режиме стоянки под током обеспечить вибрации ротора на (Порядок меньше дробного шага ШД. Опыты, поставленные на модели (2.2), дают [10] /,р=-1 Q(3 35 0,8x-1,646-3,1цн+ л +0,52>сб+0,79хб+3,32б|х„-нбх„). (2.41) Для приводов с цифрован а логов ЫМ1И преобразователями и (ИнверторaiMH тока рекомендации по оценке макоималыной частоты ШИМ приведены в [3]. 2.10. Пример расчета Дано. Линейный шаговый индукторный двигатель ДШЛ-Ш получает питание от ревероиввого двухфазного инвертора с импульсной форсироакой при максимальном иа- пряжении питания t/n = 200 В. Обмотка возбуждения двигателя подключена к источнику тока /в==0,45А. Коммутация фаз разнополярная, поочередная. Двигатель имеет следующие параметры: /?ф = 3,5 0м; 1ф=0,185 Гн; L =0,227 Гн; /ф„о„=5А; полюсное деление Тг=5-10 м; целый шаг Дл;= 1,25-10 м; масса подвижного элемента с присоединенной нагрузкой т2; = 2 кг (конструкцию ДШЛ-Ш см. в §3.2). Задание. Оценить диапазон частот управления, в котором не требуется программирование разгона и торможения ШД, и предельные скорости движения при переводе ШД в режим БДПТ. Определим вначале макоимальяое усилие двигателя Рmax - *Sr max поМ - (sr в) ном - Т Т , 2rt 510 0,227.0,45-5 = 641,8 Н. Частота собственных колебаний привода (2л;т) Ртах 2л;-641,8 2-5-ia = 635 с-1. Постоянная времени фазы без учета форсировки ГфОо=:Оо = 4-635 = 33,6. Коэффициент импульсной форсировки = 11,4. t/ф ном .фном\ 5-3,5 Эквивалентная постоянная времени с учетом перехода от импульсной форсировки к резистивной X3 = -Ll*. =-= 1,47. 2 йф 2.11,4 Эквивалентный коэффициент резистивной форсировки фз = 2/5;ф = 2-11,4 = 22,8. Эквивалентное напряжение питания инвертора с резмстив-ной форсировкой равно базовому [/б=6пэ=6Фном(Фэ==17,5-22,8=400 В. БезразмернОе внутреннее демпф'ирование Й.1-Т,гт г 635.0.102 = 0,162. Подставляя значеиия Нэ и б в уравнение i(2.5), определим зависимость частоты (Прием'истости разомкнутого привода от нагрузки ;(0пр=1,318-1,728н.н. С учетом соотношений fnp= (2/n)Qoi(unp; v p=x-f p на рис. 2.12 приведена зависимость [пр(ц.н), анализ которой показывает, что Р'азоМ(Кнутый шаговый привод а основе ДШЛ-10 может работать при Цн0,4 © диапазоне частот до 250 Гц с линейными скоростями до 0,Э1 м/с. П 300 800 BBD 500 ZBQ-100-
 0 OJ 0,2 OJ OJ dS ajS 0,7 Цд 0,3 ioju. Рис. 2.12. Предельные механические характеристики разомкнутого привода на основе ДШЛ-Ю Пределыная мехаиичеокая характеристика ШД в режиме БДПТ рассчитывается по формуле (2.13). Подставляя численные значения, получим -0.162(й-ЬО,9К l-f2,l5emg 1+2,158ш' Из графика на рис. 2.12 видно, что применяя программирование переходных процессов ил1И замыкаиие ШД пО положе-54 1*9 пред - нию в режиме БДПТ, можно расширить рабочий диапазон частот до 480 Гц, а скоростей до 0,59 м/с, т. е. почти вдв.ое по сравнению с простейшим разомкнутым приводом. Дальнейшее расширение частотного диапазона возможно лишь при .повышении напряжения питания инвертора. 3. ПРОЕКТИРОВАНИЕ ИНВЕРТОРА 3.1. Общие вопросы проектирования инвертора Процесс проектирования инвертора можно .разбить на следующие этапы: -анализ технического задания на электропривод и формулировка требований ,к инвертору; - анал1из имеющихся схемотехнических .решений, Bbr6oip наиболее пероп&ктивн'ой схемы инвертора и устройотв'а управления им; - разработка специальных средств, обеспечивающих выполнение повышенных требований по некоторым показателям (доработка исходной структуры); - разработка принципиальной схемы; - математическое и физическое М|Оделирование, доводка проекта на основе непосредственного .контроля .режимов работы всех элементов схемы; - разработка конструкции с учетом температурного режима элементов и трассировки силовых я сигнальных проводников. С'овремвнный э.лектропривод роботов и манипуляторов предъявляет п.овышенные требова.ния к .инвертору, суть которых сводится к построению инвертора по принципу регулируемого источника тока i[3], обладающего высоким быстродействием 1И точностью. Такой инвертор позволяет создать привод с перестраиваемой структурой, работающий как в разо.мкнутой схеме с дроблением электрического шага и фиксацией конечных координат перемещения, так и в замкнутой по положению схеме, когда встроенный н электрическую .машину фотоэлектрический 1или иной датчик положения (ВЫХ0.Д.НОЙ сигнал которого имеет период, равный полюсному делению машины) вы.п.олняет функции коллекто.р.а, обеспечивая ком.мут.ацию машины в .режиме беск.о.нтактного двигателя постоя.нного тока .[3]. В п.ер.в.ом случае программное управление ов.одится к последовательному выбору из пам.яти .кодов токов фаз, ооот- ветствующих заданному электрическому и механическому положению ШД. Сигналы задания подаются на вход инвертора тока и воспроизводятся им, привод отрабатывает требуемое перемещение. Коэффициент дробления основного шага определяется разрешающей способностью инвертора тока, т. е. минимальным средним током, который М'Ожет быть задан И воспроизведен инвертором. Во вторО'М случае оптимальным является привод, получивший в литературе назва'ние привода с частотно-токовым управлением [5], огда мгновенные значения фазных токов определяются .мгновенным положением вала ШД или под-вил<ной части ЛШД, формой тока, записанной в ПЗУ в виде зависимостей /1(6), /2(6),..., fm{q), и максимальным током (Моментом) /ш, являющимся управляющим воздействием: ,=/ ,./, (8); 12=/ш-/2(е),..., 1т = 1т-ыт. (3.1) Подбо'ром зависимостей /i(e),..., / (Э), которые в большинстве практических случаев являются оинусно-кооинусными, удается получить ;неИзменность М'омента при иэменении положения и скорости, т. е. реализовать приВОд, обладающий свойстваМ'И источника Момента в ши.роком диа'паз'О'Не скоростей. Механические характеристики такого бесконтактного двигателя постоянного тока (БДПТ) вертикальны, а пульсации момента отсутствуют, так кш в любом режиме работы машины динамическая .ошибка (мгновенный угол рассогласования НС статора и ротора) фиксирована и равна я/2 (нейтральная коммутация). Рассмотренный способ управления является оптимальнЫМ с точки зрения получения требуемого момента при минимальном токе и обеспечивает 1минимизацию потерь в приводе в любых режимах его работы, наибольшую эффективность ШД как электро'механичес-кого преобразователя энергии. При этом форма тока в фазе совпадает с формой ЭДС вращения, частота определяется частотой вращения ротора (скоростью перемещения подвижного элемента ЛШД). Диапазон скоростей, в котором привод сохраняет свойства источника (момента, определяется напряжением питания инвертора тока и параметрами ШД. При увеличении скорости выше некоторой гра'ничной увеличивается ЭДС вращения <н форма тока начинает отли4 чаться от заданной, приблнл^аясь ,к треугольной, появляется! фазовый сдвиг мел<ду ЭДС и током фазы, т. е. коммутапия! БДПТ становится запаздывающей. Это ведет к уменьшению! момента привода и К росту потерь в П'роцессе электромеха-! нического преобразования энергии. Такой режим работы нежелателен и МОжет быть исключен при правильнО'рл выборе напряжения питания инвертора. Привод с частотно-токовыМ управлением, который можно назвать приводом с мОМентным БДПТ, пелесообразно ис-польэовать в разомкнутых системах регулирования для обеспечения максимально быстрых установочных или транспортных Перемещений (при этом система программного управления задает момент, а значит, И ускорение рабочего органа), а также в заМ'Кнутых .позиционных и контурных системах управления роботами. Причем замыкание привода по скорости и положению может прОизвОдиться как с помощью того же самого встроенного в двигатель датчика, используемого для автокоммутации ШД, так и с помощью внешних дат-чинов. Достоинством привода с моментным БДПТ является резкое упрощение системы управления (рис. 3.1), так как 9 Рис. 3.1. Контур скорости на основе момеитного БДПТ предварительная Оптимизация путем выбора зависимостей Мб)-- /- (б) и применения инвертора тока позволяют тюлностью ,кОМпенсировать влияние внутренней обратной связи по ЭДС двигателя. В таком приводе нетрудно получить ливейнл'ю зависимость мОМента (усилия) от уровня входного сигнала инвертора f=kjm. При ограниченном быстродействии инвертора тока его инерционность учитывается эквивалентной постоянной времени т . Синтез регулятора скорости н положения (в позиционных приводах) производится известными методами теории подчиненного регулирования, а сам'И регуляторы реализуются аппаратно или программно при использовании микропроцессорного управления. Рассмотренные перспективные типы электроприв'одов роботов предъявляют к инвертору тока следующ'Ие основные требования: - сохрз'нение свойств источника тока при любом знаке и модуле ЭДС вращения и трансформаторных ЭДС, в лю-бом режиме работы привода; -высокое быстродействие (в шределе безынерционный источник регулируемого то,ка); - высокая точность воспроизведения заданного тока. Возможны два пути построения инвертора, удовлетворяющего заданным свойства.м: аналоговый источник тока с непрерывньпм принципом действия п выходным усилителем мощности в (Классе В; импульсный источник тока. При высоких требованиях по быстродействию и больших коэффициентах форсировки инвертор первого типа имеет КПД, не превышаюЩ'ИЙ нескольких процентов. Импульсный источник така имеет теоретический предел -КПД, равный 100%, а реальный КПД полностью определяется неидеальностью транзисторных ключей и потерями в цепях управления. Он может достигать 90-92% при пропорционально-токовом управлении ключами на биполярных транзисторах, суть которого состоит в регулировании и базового тока в функци.и тока коллектора -и увеличивается еще больше при замене биполярных транзисторов силовыми МДП-транзисторами. Как показано в i[3], наиболее гибкими и энергетически выгодными схемами инвертора тока для ШД являются мостовые схемы. При этом количество мостов в инверторе определяется кол1Ичеством фаз ШД. Инвариантность тока по отношению к возмущаюЩ|ИМ воздействиям ((изменение ЭДС, собственной индуктивности фазы и т. д.) достигается применением жесткой отрицательной обратной связи по току и адаптивного управления ключами моста с учетом мгновенного состояния электрических лервхменных. В мостовых схемах инверторов из-за конечного времени рассасывания заряда в базе закрывающегося транзистора не исключена возможность открытого состояния одновременно двух транзисторов одной стойки моста, что приводит к появлению сквозного неконтролируемого тока, резкому возрастанию тепловых потерь и .к созда1Нию условий для развития вторичн-ого пробоя. Исключить сквозные то-ки можно (При пр(0ектировани1И схемы у(Правления путем введения временного сдвига сигнаЛ(Ов, управляющих транзисторами каждой стойки моста. В -импульсных инверторах тока силовые транзисторы работают в режиме переключений с высокой рабочей частотой. Нагрузкой транзистора является индуктивно-активная цепь с противо-ЭДС, шунтированная .блокирующим диодам. При ЭТО.М процесс переключения имеет ряд особенностей (рис. 3.2). Пусть транзистор VT заперт, а ток фа(ЗЫ, замыкаясь через^ обратный диод VD, уменьшается. Напряжение на закрытом тра.нзисторе ра;вно сумме напряжения питания .и .падения напряжения на обратном диоде VD от тока фазы (точка /). 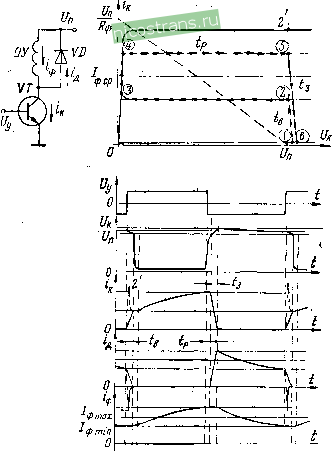 Рис. 3.2. Фазовый портрет и диаграммы переключения транзистора в инверторе тока Процесс включения VT происходит в два этапа. На .первом ток 1фшы перераспределяется между транзистором и дио,дом в ооответствии с ура-внением h ты=т^-\-1А. т. е. ток транзис- тора увеличивается, а ток диода (уменьшается (интервал 1-2). Время нарастания тока коллектора до значения /ф^ы называется временем включения и определяется частотны-М1И свойствами транзистора, т. е. его постоянной времени в активном режиме работы т. Так как процесс включения происходит при открытом обратном диоде, то апряжение U практически равно напряжению питания инвертора. Накопление неосновных носителей в диоде при его прям'ом включении приводит к тому, что обратное сопротивление VD не может мгновенно восстановиться и рабочая точка транзистора проскальзывает в точку 2, что сопровождается импульсом коллекторного тока транзистора и обратного тока диода (см. штриховую кривую на рис. 3.2). Уменьшить обратный ток можно только путем применения высокочастотных диодов с предельно малым временем рассасывания. При восстановлении запирающих свойств диода рабочая точка VT возвращается в точку 2 и начинается второй этап включения - перезаряд коллекторной емкости транзистора, который заканчивается в точке 3 полным насыщением последнего. Длительность этого этапа по сравнению с /в мала. На этапе 3-4 транзистор открыт и происходит увеличение фазного тока до максимального значения /фт за счет приложения к ОУ напряжения питания. В точке 4 на транзистор подается импульс запирающего напряжения, начинается процесс рассасывания избыточных носителей в базе и заряда коллекторной емкости до напряжения, равного напряжению питания инвертора. Время рассасывания tp (интервал 4-5) определяется постоянной времени транзистора в режиме насыщения х . В процессе рассасывания ток коллектора не изменяется. Начиная с точки 5 происходит запирание транзистора, сопровождающееся уменьшением коллекторного тока и увеличением тока блокирующего диода в соответствии с уравнением 1фшах-1к+1я. Как видно из рис. 3.2, процесс заинрания транзистора также Происходит при Uk3, Примерно равнО'М напряжению питания. В точке 6 транзистор попадает в режим отсечки. Время запирания /з определяется постоянной времени транзистора в активной зоне т и запирающим базовым током. На этапе 6-/ ток фазы, замыкаясь через Диод VD, уменьшается до /ф min- Далее процесс повторяется. Из рис. 3.2 следует, что траектория переключения транзистора крайне невыгодна, так как в коллекторной цепи П'ри переключениях сочетаются максимальный ток коллектора и максимальное напряжение на переходе коллектор - эмНттер. Это приводит к выделению На переходе энергии, которой может быть вполне достаточно дл:я необратимого повреждения транзистора в результате вторичного пробоя. ПоэтО'Му при проектировании инвертора следует обязательно сравнивать предполагаемую траекторию переключения с положением линий, определяющих область безопасной работы транзистора. Если О'бласти без'опаоной работы в технических условиях на транзисторы не указаны, а указана только допустимая мощность, рассеиваемая транзисторО'М Ркдош необходимо оценить потери М'ОШНОСти в транзисторе в самом напряженном режиме работы и, если ОНи близки к Ркдош применить специальные средства формирования безопасной лиНии переключения с помощью дополнительных реактиВ-ных элементов. 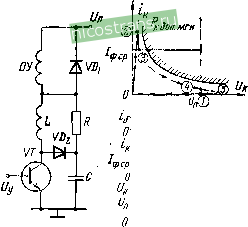
Рис. 3.3. Схема формирования траектории переключения транзистора, фазовый портрет и временные диаграммы работы Одна из самых распространенных схем формирования траектории переключения показана На рис. 3.3 [6]. Схема обеспечивает таК называемую мягкую коммутацию, когда изображающая точка, характеризующая мгновенное состояние транзистора (г'к, к) в процессе переключения движется по траектории, максимально Прилегающей к осяМ коор- 1 2 3 4 5 6 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||