
|
| |
 |
Главная » Мануалы 1 2 3 4 5 6 в транзисторе УГ2 (рг), времени запирания VT2 {t32), времени рассасывания VTI [tpi) и времени запирания VT1 [ti). Определим вначале запирающий базовый ток VT2: т / If бэ1 нас пИп I 68 зап~-бз пас ~Г'62 акт ~- ~Г - Usn зап + бэ! п ас min эЗ нас min 10 3.44+1,7541.75 3.9 = 1,95 А. Коэффициент запиран1ия транзистора VT2 h - /б2 1,95-4 = 5.2. /ка 1>5 Известно, что постоннная времени транзистора в режиме йасыщввия примерно на порядок прев-осходит .постоянную времени в активной зоне. Примем Тн=10т. Если предположить, что VT2 запирается идеальным импульсом базового тока, то с.+.%зап. 10.0,3. In := 0,233 МКС. 1+5.2 г зап С учетом времени ар.астаиия тока, равного в4, получпм <tp2 0,5Гр2+в4=0,5 0,233+0,182=0,298 мкс. Так как за время рассасывания VT2 базовый ток успевает достичь максимального значения, то переходный процесс запирания VT2 соответствует реакции на идеальный импульс тока базы 4 = X In + = аз In = 0.05 мкс. 0.05f/fe3an-2 0,05 + 5.2 Учитывая, что диффузионные транзисторы могут насыщаться даже в ненасыщенной схеме составного транзистора с непосредственным соединением коллекторов (примем нас 1 = 1,1), и предполагая, что после запирания VT2 базовый ток г'б! имеет форму, близкую к идеальному импульсу, получим = 1 1п ;1 + зап1 1+*зап1 = 31п 1.1 + 1 = 0,146 мкс. Время запирания выходного транзистора (ключа 4i = т In зап1 = 0,3 In- = 0,193 мкс. 0,05+*зап1 0.05 + 1 Полное время отключения ключа выкл=P2+32+ipi+3, =0,298+0,05+0,146+ +0,193 = 0,687 мкс. Оценим динамические потери в выходном транзисторе ключа, считая предварительно, что частота ШИМ не превыщает 20 кГц. Потери на этапах перезаряда коллекторной емкости и дополнительные потер'И в течение времени рассасывания блокирующего диода учтем коэффициентом запаса, равным a=il,5: Ркди=- alf/п/ф maaj(B+4)f ШИМ = =: -J 1,6-300-5(0,574+0,193) 10-е-20-103=(17,ЗВт. Максимальное значение ЭДС вращения в относительных единицах Етах 2Л , , 1 Е* = - - L-lhmax - 0,227-0,45 0,74-1- = 0,317. 5-10 Макоим-альный ток фазы в относительных единицах /* = ф max I ф mat фтахф 5-3,5 = 0,058. /кз ~ Un 300 Скважность импульоов ШИМ лри П101ддержан1ии максимального тока П'ри максимальной скорости .у=/ф* +* =0,058+0,317=0,37б. Падение напряжения на переходе коллектор-эмиттер открытого ключа 1/кэ1=!/бэ нас 1 + Убэ нас 2 = 2+2 = 4 В. Потери в открытом транзисторе без учета пульсаций тока Ро=кэ 1 /ф 7 4 5 - 0,375=7,5 Вт. Суммарные п.отери мощности в выходном трашисторе в самом -неблагоприятном -режиме работы инвертора Рк. = /о+Ркдин=7,5+17,3=24,8 Вт не превышают допустимых Рк доп=50 Вт, что свидетельствует О ра.ботоспоообности оироектиронанного ключа. ФормирО'ва-нпе линии переключения следует применять лишь с целью повышения надежности инвертора. е) Расчет элементов, формирующих линию переключения транзисторов При включении ключа с элементами, формирующими траекторию переключения транзистора, время включения определяется скоростью нарастания коллекторного тока, протекающего через дроссель L, обратный диод VD1 и транзистор VT1 в режиме насыщения (см. рис. 3.6) где /доп - Д10П1устимое значение броска колле1кторного тока. Считая это времн таким же, как в ключе без формирующих элементов, найдем т.ребуемую индуктивность дросселя, приняв /доп=7 А: - = 0,574-10-6- 0,025 мГн. БмКость С2 определим из условия, чтобы время отключения ключа не превышало времени отключения без цепей формирования траектории переключения [6]: 2 1фтах-Н 9 Уп 2-5-0,193 10 9-300 = 0,00071 мкФ. Примем С2=0,001 мкф. Сопротивление разрядного резистора и„ зоо доп max 150 Ом. В качестве разрядного диода VD3 выбираем высокочастотный диод КД212А. Оценим времена разряда дросселя и емкости С2 после включения или отключения ключа .(ом. рис. 3.3). Как показано в. [6], при выполнении условий 0,83(/?8) 2< (,L/C2)Kil,55 (8)\ справедливых в нашем случае, эти иремени можно определить так: /-f ~6ii- = 6 oo5 o = 1 мкс; А, 150 Граз 6/?С=6-150-0,001-10-5=0,9 мкс. Как видим, отвод энергии, накопленной в реактивных элементах ключа, требует достаточно большого времени. Если к очередному переключению эта энергия не израсходуется полнО'Стью, то цель ©ведения формирующих элементов не будет достигнута. Поэтому полное время включения и отключения ключа следует считать равным 4клх = /вкл++раз = 0,574+1 = 1,574 мкс; /вь,клх = икл-ЬГраз = 0,687+0,9= 1,587 мкс. Для дальнейшего расчета схемы управления примем с некоторым запасом /вкл2;=/выкл2=2 мкс. ж) Расчет схемы управления инвертором Усилитель обратной связи Схема включения датчика тока показана на рис. 3.10. Выходной разностный сигнал, поступающий на вход дифференциального усилителя (ДУ), упрощенная расчетная схема которого приведена на рис. 3.11, определяется выражением fj J RmR2 I RmRi * iRui+Ri+Ri) (Rш^-R + RI)(.RЛR2) Очевидно, что первая составляющая напряжения Ui-U2 представляет собой полезный сигнал, а вторая - систематическую ошибку, знак которой меняется при изменении знака тока. Определим суммарное сопротивление делителя напряжения из условия, чтобы систематическая ошибка при поддержании минимального тока не превышала 1%: /?1+/?2>100- =100- = бои кОм. /фт/п 0,05 Здесь 1фтгп найдено из услойия создания инверторам минимального требуемого тока при ма1ко мальном коэффициенте дробления шага: ф min = 1фтах- tgaдp= /ф max tg (я/ (2Адр) ) = =5tg(K/(2-156)) =0,05 А. 6-1323 в качестве усилителей А1-A3 выбираем быстродействующие операционные усилители (ОУ) 574УД1, имеющие коэффициент усиления ио надряжению киБОШ) и высокое ОУ Б 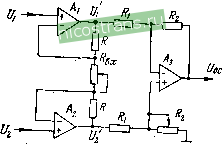 Рис. 3.1IO. Схема иключе- Рис. 3.11.. Дифференциальный усилитель 1НИЯ датчика тока датчика тока входное оолротивление /?вх ЮООО МОм. Эти усилители допускают подачу на вход синфазного С1игна.ла, не превышающего 6сф30В. Задаваясь максимальным значением синфазного сигнала /сф ю=10В, определим сопротивления (резисторов R2 Н2={>Н1+Н2)исфгпш/и„=тО-10/300=20 кОм. Примем У?1 = 620кОм; !/?2=24кОм. Сопротивление под-строечного резистора Нз=2,4 kOim. Сопротивление шунта выбираем из условия получения при минимальном токе фазы полезного сигнала на входе дифференциального усилителя, на порядок превышающего температурный дрейф напряжения смещения AUcu/AT= = 100 мкВ/°С: /?>10A[/, 5i±i 10.100-10-6-5 /фт/п-/?г 5-0,01-24 - 0,53 Ом. Примем У?ш=0,5Ом, тогда макоимальное значение сигнала иа вдоде дифференциального усилителя, соответствующее максимальному току: {Ul-U)ma. = /ф п.а. - 5 = 93;2 МВ. Ri+Ri 644 Дифференциальный усилитель (рис. 3.11) [8] в статике описывается следующей системой уравнений; (1+2 \ Квх/ где кос сф - коэффициент ослабления синфазного сигн,а.л.а операционным усилителем. Для 574УД1 20 Ig оссф=80дБ, откуда йоссф= 10000. Как следует из зтих соотношений, первый каскад усилителя без изменения пропускает синфазный сигнал на выход, усиливая дифференциальный полезный сигнал, а второй каскад обеспечивает подавление синфазного сигнала в большей степени, чем меньше его йоэффициент усиления по дифференциальной составляющей Ri/Ri- Так как сопротивление нагрузк1и для ОУ долж!НО -быть не меньше 2 кОм, примем /?i = /?2=i10kOm. Тогда из условия получения на вы.ходе усилителя обратной связи при максимальном токе 5 А напряжения б В определим коэффициент усиления ДУ * е= 1 +2 = -Л^-=- = 53,6, {Ui-UiUax 93,2-10- откуда R/Rbx=26,3. Примем /?вх=2,2 кОм, R = 56 кОм. Применение регулируемых сопротивлений Rbx и R2 (рис. 3.11) пОЗволяет произвести точную настройку усилителя в процессе на.ладки. Выбранная нами схема усилителя обеспечивает требуемую точность поддержания тока в инверторе, так (ка.к мак-сима.льная ошибка на выходе ДУ за счет п,рило,жения к его входу синфазного сигнала не превышает 1 мВ, что для тока 1фтш составляет не более 2%. Триггеры Шмитта На рис. 3.12 показана схема триггера Шмитта (ТШ) и его статическая характеристика. Сравнение сигналов за.да-ния тока if/зт и -обратной связи по току Uoc произв.одится на минусовом входе операционного усилителя; в качестве последнего выбираем .быстродействующий интегральный компаратор 521 СА2, выходные нацряже.ния которого соответ- ствуют уровням логичеокош Нуля и логической единицы микросхем -Бранзнсторно-пранзисторнон л'Опиии (ТТЛ): f/Tmmax==3,2 В; [7, , = 1[/о =-0,5 В. Компаратор позволяет исключить промежуточное преобра-зовЗНие уровней сигналов и долуокает непосредственное соединение сВОего выхода со входом одной ТТЛ-(микросхемы. 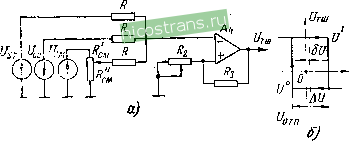 изт-Uo UcpaS Рис. 3.12. Расчетная схема триггера Шмитта и его статическая характеристика С помощью делителя напряжения на резисторах /?2 и Яъ на вход ТШ подается оигнал! положительной о^братной связи, величина которого определяет ширину петли гистерезиса А1/. Узел смещения на резисторах Rev! и Ru задает требуемый сд1виг статической характеристики относительно начала координат.Ххема. обеспечивает инвариантность порогов переключения триггера к заданию тока и сигнала обратной связи, реагируя только на их разность. Смещение характеристики ТШ не изменяет ширины зоны нечувствительности А[/. Определим минимально допустимое значение относительного сдв'ига дв1ух токовых коридоров Между собой 26/. Длительность временной задержки управляющих импульсов, поступающих на ключи одной стойки, должна быть не меньше времени отключения ключа /задяс=4ыклг = 2мкс. Эта задержка формируется У?С-цвпочками в блоке защиты инвертора от сквозного тока. Время с момента фактического достижения током фазы верхнего порогового уровня ТШ1 (рис. 3.5) до момента начала опадания тока назовем време-iHCM задержки опадания тока (см. рис. 3.7) зад сн = /зад ду--зад тш--/зад в2.14-/зад D4.2-J-выклх = = 110 НС-f 130 НС-1-40 НС-1-40 НС-f 2 мкс=2,32 мкс, где эад ду - 2зад оу - 2 вых Шах \ dt } 90. 10 -110 нс, а остальные параметры определены из паспортных данных а интегральные компараторы и микросхемы. Время с момента фактического достижения током нижнего порогового уровня ТШ2 (рис. 3.5) до момента нарастания тока назовем временем задержки нарастания тока зад нар 3-Ь^зад в1.1--/зад RC-\- зад дУ-Ь^зад ти(--зад Dl.S + /задв3.14~вклг = = 1 Юнс-Ь 130,HC-f 40 Hc-f 40 нс+ 4-2м1кс--40нс--2м1КС=4,36 мкс. Ма1Коимал1Ьное значение tcimhob нарастания и тока при лоддержа.нии инвертором мин.имального малой ЭДС вращения - I . . - ц ~ 0,185 опадания тока прИ = 1622 А/с. I dt /нар шах \ dt Jen mat Для того чтобы за счет инерционности схемы управления не происходИло пересечения сразу двух границ токовых коридоров и инвертор-не переходил при этом во второй импульсный режим работы с повышенной частотой переключений, необходимо выполнение следующих условий: \ dt }п 4адсп<2б/, 0,5-1б22-4,36-10-6 = 3,54 мА. ./ <28/- \dt,Lax заднар-0/, >0М') ./зад„ар Зададим б/=4мА. При этом максимальная систематическая ошибка в воспроизведен1ИИ среднего тока не превосходит 0,08% для максимального значения тока и 8/о для минимального, что допустимо. Шир1ину токового 0!ридора А/ выбираем из условия получения при минимальном заданном токе пульсаций, не пре-вышающи1Х 25 /о от среднего значения тока: iA/< 2 0,25 min=2 0,25 0,06=25 мА. Примем А/=24 мА. Оценнм маКОИ|Ма.Л1Ь1Н|ую частоту ШИМ при выбранном токовом оридоре [3]: /* = 0125 0.125 {Уп. 0.125 300 .. Д/* Д/ ?ф 24.10-3 -440,4, fma.=f*ma.h = = Гша. =446,4 = 8,45 КГЦ. Ф i-g 0,185 Как следует из расчета динамики транзисторното ключа, эта частота д-опустима. С учетом выбранного ранее коэфф!ициента усиления усилителя обратной связи но току 1.В/А и обозначений, приведенных на рис. 3.il2, триггеры Шмитта должны иметь следующие параметры: At/=24MB; й[/=4мВ; сраб1=;16мВ; отп1 = -8мВ; сраб2 = 8мВ; 6отп2= -16 мВ. Если сопротивление смещения Нем на порядок меньше сошротивления резисторов R (рие. 3.12), то с погрешностью до 1% оправедл1иво ооотношение AU=A (примем для обоих триггеров R=47 (иОм; Ra-lO кОм. Требуемое значение 10-103 3(3.2 + 0,5) Rc =4,7 kOm; = 21,7 Ом. 24-10 В качестве R2 выбираем переменный рв3(истар J?2=100Om для обеопечения регул(иров1к1и ш1ирины токового .коридора при наладке инвертора. Примем LcM=il2B. Требуемые коэффициенты деления напряжения смещения k,ie =i{Rcu+Rc )/Rc найдем исходя из условия получен(ия эаданны.х на(пряже ий орабаты-ва!ния триггеров: k - дел - Ri+Ri дел1 - 3-21.7 2i.7-f 10000 3,2- 16-10-3 2523; дела - 3-21,7 . 21,7-f 10000 3.2-8-10 = 940,7. Для обеспечения требуемой точности в качестве Rcu целесообразно применить отдельные резисторы: Р ~ ; Л ~ iiZd 1 863 Ом; >дел 2523 2 9407 Примем ? см1=4,8 0м; У? с„2=5,1 Ом. Блок защиты инвертора от сквозных \токов Определим параметры /?С-цепей, задающих требуемый временной сдвиг между управляющими импульсами задлс = = 2 мкс. Из услов(ия ограничения выходного тока микросхем D1.1, D1.3, D2.1 и D2.3 (см. рис. 3.7) предельным допусти-(мым томом /вых max и из условия f/c(0) <[/пор, которос означает, что при разряде емкости С напряжение на ней меньше порогового уровня, достаточного для переключения микросхем D3.1, D3.2, D4.1, D4.2 [/пор. определим сопротивления реэисто(ров R31-R34: /1 вых max <R< (£n-f/63mt-№)(t/ op-(; ) /вх(£п- /пор fJ(,3 мт) где £ =5 В - напряжение питания, мс; бэ мт=0,8 В - падение напряжения на -переходе база-Э1миттер многоэмиттер- опо входного tpaihshctopa, мс; /°вх= 1,6 мА-ВХ10Д1НОЙ ток, iMC, (ПрИ входном напряжении U°; /выхт(и = раз-/вх = ==10-40=400 мкА; йраз- коэффициент разветвления, мс, по выходу. (Подставляя численные значения, получим ,=7,5кОм</?<<---;---°> =0,84 ком. 0,4-10-3 1,6.10-3(5-1,3-0.8) При(мем /? = 4,3 кОм. !В(ремя задержки, определяемое разрядом конденсатора, ра(вно 9: - зад С = /?С1п(--j. зад RC 2-10 4.3.103 In 3-0,3 4,3-10з) = 557 пФ. и,3-0,3 Ь40 10- Примем С8-С11=560 пФ. В заключеиие отметим, что точностные и динам1Ичеокие параметры инвертора удовлетворяют всем требованиям технического задания. 4. МИКРОПРОЦЕССОРНОЕ УПРАВЛЕНИЕ ШАГОВЫМ ЭЛЕКТРОПРИВОДОМ С иоя1Влением и быстрым развитием микропроцессоров (МП) появились Н'Овые В'озможности управления сложными системами шаговых электроприводов: а) Однотнп1иое схемотехническое решение системы управления для приводов, выполняющих различные функции (программное управление, слежение и т. д.), т. е. при неизменной архитектуре системы различные алгоритмы управления могут быть реализованы программно. б) Универсальность и гибкость у|правления, состоящая в простоте коррекции програм^мы при изменении условий эк-спл|уатации, например нагрузки, при замене двигателя, мо-< дернизации оборудования и т. д. в) Простое сопряжение с управляющей ЭВМ более вы- сокого уровня, позволяющее строить сложные взаимосвязан-! ные системы гибких автоматических линий и робототехни- ческих комплексов с возм.ожностью оперативной замены ал- торитмов управления отдел-ьным.и приводами посредством, записи новой программы. ; г) простота регистрации и контроля параметров системы, диагн'остики неисправностей. д) Снижение стоимости системы управления (СУ), если эквивалентная схема на жесткой логике реализована на 30 и более корпусах интегральных М'икросхем (ИС), повышение надежности за счет сокращения числа соединений. Особенно перспективным является применение микропроцессоров в роботах и манипуляторах. На простейшем примере разомкнутого шагового .позиционного электронри-В'Ода ОДН10Й координаты робота рассмотрим особенности п.роек-тирования таких систем. На рис. 4.1,а приведена блок-схема привода, состоящая из реверсивного двоичного счетчика, выполняющего функции сравнения заданного и отработанного лути, блока программного разгона и торможения, формирующего закон изменения частоты управления в функции пройденного пути (ом. фазовый портрет на рис. 4.1,6), распределителя импульсов (РИ), уоилителя мощности и шагового двигателя. Входной сигнал в виде параллельного двоич.ного кода заданного перемещения Ns записывается в счетчик. Одновременно подается сигнал выбора направления двих<ения на распределитель импульсов. 4j ри шах flip пах Рис. 4.1. Блок-схема позиционного шагового электропривода В блок программного разгона и торможения записывается код максимальной (или требуеМ|0Й) частоты управления (скорости перемещения) N, ,ах- Если эта частота не превышает частоты приемистости ШД Uv, то управляемый генератор импульсов, находящийся в блоке БПРТ, выдает последовательность импульсов постоянной частоты fy = fmax (кривая 3 на рис. 4.1). Эти импульсы п.оступают одновременно на вход РИ и на вычитающий вход счетчика пути. При отра- i6iOiTiKe заданного перемещения {АМ==0) генератор импульсов отключается и привод останавливается. Если /m<K>/np,J то БПРТ формирует при разгоне оптимальный по- быстродействию закон изменения управляющей частоты (см. § 2.3). Возможны два варианта определения момента торможения. В первом случае табличная завиоимость Nr{fy), соответствующая уравнению линии переключения, полученной при оптимальном по быстродействию и качеству переходного процесса (отсутствие пвререг1улирования, дотягивания и т. д.), торможение записывается в ПЗУ, находящееся в БПРТ. В момент времени, копда расоогласова:ние по П10Ложению ans равно Л^т, подается команда на торможение и происходит программное снижение частоты. Во втором случае пути разгона Л^р и торможения Л^т считаются одинаковыми. Тогда для краткоиндексного цикла (кривая 4) сигнал начала торможения подается при ans = ns/2, а при полноин-дексвом цикле (кривые /, 2)-при AN, = Nt:. При этом различные условия при пуске и торможении учитываются зада- нием различных законов иэменения fy{t). входной порт РИ p5l числон Х-  dj de ds d/i ds 4 do зап. ш шу>-{шд) \o\i\i\o\o\Т\ТШ I/1/1д|g у I / g о I \o\o\i \1 \о\о iTp Но\0\1 ]ТТ7]ТГГГ7~Н Рис. 4.2. Схема организации РИ Как ВИДНО из алгоритма работы схемы, аппаратная реализация СУ получается достаточно сложной. Покаж-ем, как те же задачи могут быть решены с помощью мик,ропроцес-copHoiro управления. На рис. 4.2, а изображена схема, выполняющая функции распределителя импульсов, состоящая из собственно МП дешифратора адреса ДА выхоД|НОгр порта, выполнен/ного Щ основе регистра с параллельной записью, схемы совпадения И, усилителя мощности и ШД. При поступлении на шину адреса МП кода выходного' порта РИ сигнал на выходе дешифратора адреса становится равным логической единице. Одновременно с приходом сигнала Запись в устройство ввода-вывода (ЗАП/УВВ) появляется сигнал разрешения записи на входе V регистра RG я я него записывается информация с шины данных МП, соответствующая коду включенных состояний фаз. Для управления четырехфазным ШД используются четыре младших бита do-ши-ны данных. Каждый бит регистра выходного порта управляет своим .каналом УМ. При выдаче по шине данных числа /? = 00110011 включены 1-я и 2-я фазы ШД. Используя команду циклического сдвига содержимого аккумулятора МП (ом. рис. 4.2, б) влево или вправо, в зав;иоимости от направления движения получают цикл парной коммутации. Гибкость такого управления со-стО'ИТ в том, что замена числа R позволяет организовать любой тип коммутации. На рис. 4.3,а показана полная блок-схема шагового электропривода, в которой все функции, выполняемые схемой на рис. 4.1, реализуются программно. Схема состоит из центрального процессора ЦП, тактового генератора, интерфейса центрального процессора (шинные формирователи-усилители, позволяющие подключать к шинам процессора -неограниченное число потребителей), интерфейса памяти (дешифратор страниц памяти, двунаправленные шинные формирователи с тремя состояниями, обеспечивающие про-хождение информации от ЦП и к ЦП, а также полное отключение от оины), интерфейса устройства ввода-вывода с аналогичной структурой, ОЗУ, ПЗУ, ПИЗУ, устройств ввода-выво.-да (клавиатура, дисплей и т. д.) и интерфейса ШД, структура которого подобна изображенной на рис. 4. 2. В случае применения электрического дробления шага для повышен-ия то1ЧНОсти поз1ИЦИони1рован1Ия изменяется силовая часть привода. При этом, как показано на рис. 4.3,6 штрихпунктиром контуре 2, ШД получает питание от уп-равляемого источника тока, число каналов которого равно числу фаз, а сигнал задания тока формируется путем циф-роаяалогового преобразования кода заданного тока, поступающего от процессора. Законы изменения фазных токов в функции номера электрического состояния в данном слу- 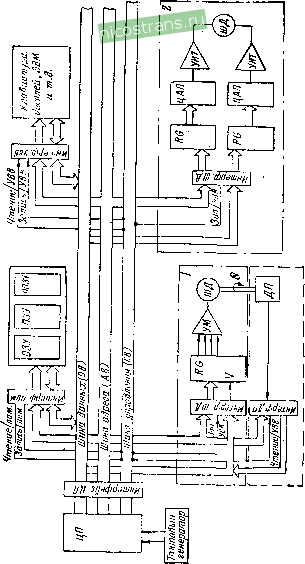 s я <u я о. с >, § ш s o. a о о. о а о о о чае предварительно записываются в память шроцессора (ППЗУ или ПЗУ). При 1нео|бходимост!и расширить частотный диапазон работы, Повысить устойчивость и нагрузочную способность привода его переводят в режим БДПТ. Замыкание внутреннего юнтура положения может быть осуществлено двумя путями, минуя пропесоор или, как показано на рис. 4.3 (штри-XiOBoft KOiHTyp), через пропессор. В первом случае управление двигателем принципиально не отличается от управления коллекторным двигателем постоянного тока, за исключением дополнительной возможности управления по каналу угла коммутации (сдвиг щеток). Во втором случае, например для схемы 1, процесс управления заключается в регулировании времени задержки подачи очередного 1имлульса переключения, поступающего от датчика положения ДП. Длительность задержки может быть предварительно записана в ПЗУ МП в ф|ункции требуемой скорости движения либо- вычисляться программой регулятора скорости. Схема 2 обладает больши-MiH функциональным1и возможностями, в частности, помимо описанного способа управления, в ней может быть реализовано в зоне низких скоростей частотно-токовое управление с автоматическим переходом в зоне высоких скоростей на управление углом комм.утации. Последний npiHBOfl относится к адаптивным приводам с перестраиваемой структурой и .применение niponecoopa здесь необходимо. Постро.ение регуляторов для БДПТ принципиально не отличается от традиционных методов, изложенных в теории электропривода [12], а их программная реализация зависит от возможностей МП по разрядности и быстродействию. Рассмотрим в качестве примера блок-схему (рис. 4.4) программы управления разомкнутым .позиционным приво-Д0.М с алгоритмом работы, соответствующим рис. 4.1. Вся па.мять процессора предварительно разбивается на следующие участки: область ПЗУ, в которой с .нулевого адреса расположена собственно управляющая программа; область ПЗУ, в которую записаны таблицы в.ременных задержек, обеспечивающих для данного привода оптимальный по быстродействию разгон и торможение; область ОЗУ, выделенную для хранения промежуточных результатов; область стека. В составе устро:йств ввода-выВ|0да обычно имеются регистры временного, хра.нения данных, в К|Оторые с клавиатуры оператором или от устройств ЧПУ вводится инфор.мация о .направлении требуемого перемещения и его величине, о Загрузка вершины стена SP; адреса тал.М^1 Д>1 4а ет Уход на In Задержка I ,;3адержкй Вывод R, переключ. т Вывид R, перенлюч. CoSuzR i ± njn Задержка Загрузка вешек т Считывание fi/r. Нет/ \Да ВозВрат Нет та рм о- женае ГОжидание\ KjioB. задании j Рис. 4.4. Блок-схема программы максимальной скорости движения и о типе коммутации ШД (например, одиночная или парная). Программа составлена для процессора К580 и начинает свою работу с загрузки начального адреса вершины стека в регистр стека SP (в указатель стека), начального адреса таблицы временных задержек в один из регистров общего назначения РОН. Оче-редньши командами в ОЗУ загружается с внещнего УВВ ЧИСЛО', соответствующее требуемому напра-влению движения jVh (1-вперед. О -назад) и двухбайтовое число АЛ/, соответствующее заданному пути As (в щагах ШД). Максимальный заданный путь равен при этом 2б=64 К шагов. Далее загружается число Nrmn, соответствующее минимальной задержке (максимальной частоте управл1яющих импульсов frnax), и число R, определяющее тип коммутации. После команд загруз1ки прО|ИЗвод|Ится проверка старшего байта рассогласования по пути AjVct на нуль. Если АЫ, Ф ф^, то производится сравнение начальной задержки Л/т! ИЗ таблицы задержек (которая соответствует управляющей частоте, равной частоте приемистости ШД) с числом Nmin- Если NminNu то Л^; присваивается значение Ыгшгп И движение производится с постоянной частотой управления (кривая 3 на рис. 4.1). Соответствующая ветвь программы помечена меткой М^. В противном случае производится сравнение задержек, соответствующих текущей и максимальной частоте управления. Если Nri>Nrmin, то происходит программный разгон (ветвь Mi), в противном случае максимальная скорость достигнута и fy=const (ветвь Mi). На рис. 4.4,6 приведена блок-схема подпрограммы задержки, которая число Nru записанное в таблице задержек, превращает во временной сдвиг выдачи очередной команды на коммутацию ШД. Вначале производятся о-чистка РОН -Путем записи их содержимого в стек ц загрузка новыми адресами, апределяющИМ-и область ОЗУ, необходимую для выполнения подпрограммы. Про1иэводится считывание Nri и организация цикла уменьшения этого числа на 1. По истечении ЭТ0Г10 цикла следует возврат в основную программу с последующим выводом числа R в выходной порт РИ и коммутацией ШД. В зависимости от числа /V производятся Сдвиг R влево или вправо (см. рис. 4.2) и переход на очередное значение задержки Nri-Nra+i). Рассогласование по положению AN, уменьшается на единицу, а путь торможения увеличивается на единицу. Следует возврат ino> метке Мо. Ветвь М2 строится аналогично, только Nt не меняется, так как идет движение с постоянной частотой управления. При ANsCT-0 происходит сравнение ЛЛмл с путем тор-можен.ия и в случае их равенства начинает работать программа торможения, построенна.я а^налогично программе разгона. В тротивном случае осуп1ествляется возврат по метке П|Осле окончания торможения лронессор находится либо в режиме ожидания нового задания на перемещение, либо выполняет другие функции (например, тонтроль, диагностика), возвращаясь в последнем случае к основной про-грамме по прерыванию. Для работы в реальном масштзбе времени управляющая программа должна быть написана на языке ассе.мблера. Особенности перевода описанного алгоритма на ассемблер читатель найдет в [13]. [Повышение быстродействия привода в случае необходимости может быть осуществлено путем реализации отдельных частей алгоритма аппаратными средствами. Так, например, счет пути и распределитель импульсов можно- выполнить аппаратными средствами [3]. При этом максимальная частота управления возрастает с lil,4 до 27 кГц (для процессора К580). Да-льнейшее совершенствование микропроцессорной техники позволит реализовать более сложные алгоритмы управ-лен'Ия ШД, в частности управление по математической модели привода, управление с косвенным определением координат и т. д. ПРИЛОЖЕНИЕ ТЕХНИЧЕСКИЕ ДАННЫЕ ШАГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ В табл. П.1-П.5 приведены основные параметры и эк-опдуатационные показатели вращающихся и линейных шаговых двигателей. Двигатели вращательного типа имеют закрытую необду-ваемую конструкцию с двумя подшипниковыми щитами и фланцевым креплением к мвха1ниэму. Линейные однокоо-р-динатные электродвигатели выполнены на лапах с двухсто-poHHiHM выходом штока и линейными подшипниками качения. Подвижный элемент линейного ШД для всех двигателей, кроме ДШЛ->10, имеет трубчатую конструкцию, а для ДШЛ-10 - решетчатую конструкцию. Двигатель ДШЛ-8 является линейно поворотным и состоит из двух, объединенных в одну конструкцию, двигателей вращательного и поступательного типов. Параметры вращательной части приведены в табл. П.4 в знаменателе дроби. Все линейные ШД, кроме ДШЛ-ilO, индукторные с самовозбуждением за счет постоянной составляющей тока фаз. ДШЛ-10 имеет независимое электромагнитное возбуждение (/в ном = 0,45 А). Плоские двухкоординатные ШД ра-ботают с аэростатическими опорами и -имеют ход по координатам X и Y, ограниченный лишь размерами плиты индуктора (в табл. П.5 приведены только размеры подвижного якоря). Эти двигатели - магнитоэлектрические. Все габаритные размеры указаны без учета размеров вала, т. е. даны диаметр и длина корпуса машины. Технические данные соответствуют основной системе коммутации. Для плоских ШД - это восшитактная парная разнополярная коммутация, для двухфазных индукторных магнитоэлектрических - четырехта1ктная парная разнополярная, а для всех остальных - четырехтактная парная одяополяр-ная ком-мутация. Все параметры, кроме частоты приемистости, приведены к температуре 20°С. Частота приемистости указана для самого неблагоприятного случая (максимальная температура окружающей среды и двигателя, минимальное напряжение питания инвертора и др.) при номинальной нагрузке. В таблицах: а-шаг двигателя; т - число фаз; /г -число тактов коммутации (без дробления шага); рп - число пар полюсов; Zr - число зубцов ротора для индукторных ШД; Xz - полюсное деление; М™ , Fax - максимальный ста-тичеокий синхронизирующий момент или усилие; М„ ом - номинальное значение момента нагрузки; Jp, /н иом - момент-инерции ротора и номинальный момент инерции нагрузки; /ф ном, 1фтах - номинальное и максимально допустимое значения; Рф°° - сопротивление фазы при 20°С; 1ф - индуктивность фазы магнитоэлектрического ШД; Lo, Li - эквивалентные значения постоянной и переменной составляющей индуктивности фазы индукторного ШД; Фтах=кнас 0+ L\-\-La) - максимальные индуктивность фазы индукторного ШД с учетом индуктивности рассеяния La и насыщения магнитной цепи (нас<1); 1 2 3 4 5 6 |